RL: Why It Matters More Than Ever
A comprehensive guide to Reinforcement Learning — from Q-Learning and DQN to A3C, PPO, and real-world projects. Covers the math, the code, the key papers, and why RL is more important than ever.
RL:Why It Matters More Than Ever
In 2016, the world witnessed a moment that redefined the boundaries of artificial intelligence. A system called AlphaGo, created by DeepMind, faced off against Lee Sedol, one of the greatest Go players in history and won. It wasn’t just another AI victory. It was a turning point. Unlike traditional chess engines that rely on exhaustive search or hand coded rules, AlphaGo taught itself to play through millions of simulated games, refining its strategies over time until it could outthink its creators.

Imagine a Go board filled with black and white stones. Each move AlphaGo makes isn’t based on memorized plays. It’s the result of trial and error, where every victory and defeat becomes data. Over thousands of matches against itself, it began to recognize which patterns led to success forming a kind of machine intuition. What made that victory extraordinary was not that the AI beat a human, but how it learned to do it. AlphaGo’s intelligence wasn’t pre-written; it emerged through interaction and feedback the very essence of Reinforcement Learning (RL).
Reinforcement Learning differs from most of the AI systems people talk about today. In supervised learning, a model learns from labeled examples it’s like having a teacher provide the correct answers to every question. In unsupervised learning, models explore patterns in data without explicit guidance. But in reinforcement learning, there is no teacher. Instead, the model learns by acting taking an action in an environment, observing the result, and adjusting based on the feedback it receives. It is an ongoing loop of experimentation and improvement, the closest computational analogy to how humans and animals learn through experience.

You can visualize this as a circular cycle. The agent (our decision-maker) observes its environment, performs an action, and receives a reward a signal of how good or bad that action was. Based on that reward, it updates its policy, which is its internal playbook for what to do next. The more it interacts, the better its decisions become. The process looks beautifully simple in code
for episode in range(num_episodes): state = env.reset() done = False while not done: action = policy(state) # Agent decides next_state, reward, done, _, _ = env.step(action) # Environment responds update_policy(state, action, reward, next_state) # Learn from feedback state = next_state
Each episode represents a full attempt by the agent to reach a goal. Each iteration within it is a small moment of learning the agent takes an action, sees how the world reacts, and slightly refines its behavior. Over time, this repeated process transforms random behavior into deliberate intelligence.

Picture a robotic arm trying to grasp a cup. The first few attempts are clumsy; it drops the cup again and again. But with each try, it receives feedback: how close it was, whether it succeeded, and what its sensors observed. Slowly, it adjusts refining its movements until, one day, the cup is lifted smoothly. That moment when trial becomes mastery is what makes reinforcement learning extraordinary.
The applications of this idea are everywhere. In robotics, RL allows machines to adapt to the unpredictability of the real world, learning balance, grip, and movement. In autonomous driving, cars use RL to make split-second decisions that keep passengers safe. In research environments like OpenAI Gym and MuJoCo, developers train virtual agents to play Atari games, walk, jump, and even control drone flight. Even in digital spaces, platforms like YouTube and Netflix use reinforcement learning to refine their recommendation systems, constantly adjusting what they show users based on engagement each click or skip becomes a tiny reward or penalty that shapes what comes next.
Here’s a small glimpse of how RL actually looks in one of those simple environments a Q-Learning agent exploring the classic FrozenLake problem from OpenAI Gym:
import gym import numpy as np
env = gym.make(“FrozenLake-v1”, is_slippery=False) Q = np.zeros((env.observation_space.n, env.action_space.n))
alpha = 0.8 # learning rate gamma = 0.9 # discount factor epsilon = 0.1 # exploration probability
for episode in range(1000): state, done = env.reset()[0], False while not done: if np.random.rand() < epsilon: action = env.action_space.sample() # Explore else: action = np.argmax(Q[state]) # Exploit known info
next_state, reward, done, _, _ = env.step(action) Q[state, action] = Q[state, action] + alpha * (reward + gamma * np.max(Q[next_state]) - Q[state, action]) state = next_state
What’s remarkable about this tiny block of code is that it contains no answers, no teacher, and no labels. The agent starts clueless slipping, failing, and retrying. But by the end, it develops its own map of what works and what doesn’t, encoded in the Q table. It has learned by doing.
Reinforcement Learning has since evolved far beyond the Go board. It powers factory robots that can assemble delicate machinery, autonomous drones that can coordinate in flight, and adaptive control systems that manage energy usage in smart cities. It even influences how conversational models like ChatGPT are aligned with human values, through a process called Reinforcement Learning from Human Feedback (RLHF) where models are refined not just for accuracy, but for helpfulness and coherence.
In essence, RL represents a shift in the very definition of machine intelligence from systems that memorize information to systems that learn through interaction. It’s no longer about teaching machines what to do; it’s about giving them the ability to discover what works. The beauty of RL lies in this simplicity a loop of curiosity, feedback, and growth the same loop that drives evolution, learning, and intelligence itself.
Where Reinforcement Learning Fits in AI
If AlphaGo showed what reinforcement learning could achieve, understanding where it sits in the broader world of AI reveals why it’s so fundamentally different. Machine learning, as a whole, is about finding patterns that help systems make decisions. But not all learning is created equal. There are three main branches that define how machines acquire knowledge and reinforcement learning stands apart from the rest.
In supervised learning, we act as the teachers. The model learns by studying pairs of inputs and outputs labeled examples that show it exactly what the right answer looks like. Think of it as a student learning with an answer key. The process is powerful but limited: the model can only generalize from what it’s shown. It doesn’t explore, and it doesn’t invent; it just learns to mimic patterns that already exist.
Unsupervised learning is more like giving that same student a stack of data with no answers and asking them to find structure in it. These systems search for clusters, relationships, or anomalies hidden within data. They can identify customer segments, compress information, or uncover hidden trends but they don’t act on what they learn. They’re observers, not participants.
Reinforcement learning, however, changes everything. There is no teacher, no labeled data, no static dataset. Instead, there is experience.
The model or agent exists within an environment, and every choice it makes affects what happens next. It takes an action, observes the outcome, and receives a reward a signal of success or failure. That feedback updates its internal decision strategy, known as a policy. Each round of interaction improves the policy, making future decisions slightly better.
This process is not just statistical learning it’s behavioral learning.

Imagine a cycle spinning endlessly:Agent → Action → Environment → Reward → Policy Update.Each pass through the loop sharpens the agent’s understanding of the world around it. At first, it acts blindly, like a baby exploring through touch. But with every reward, every correction, its behavior becomes more intentional. Over time, randomness gives way to intelligence.
This dialogue between the agent and the environment can be expressed in just a few lines of Python simple, but powerful enough to capture the entire philosophy of reinforcement learning.
for episode in range(num_episodes): state = env.reset() done = False
while not done: action = policy(state) # Agent decides next_state, reward, done, _, _ = env.step(action) # Environment responds update_policy(state, action, reward, next_state) # Learn from feedback state = next_state
What happens here is almost poetic. Each loop represents an episode a lifetime for the agent. It begins in an unknown state, makes decisions, collects experiences, and finally learns something about how to survive or succeed. Then it starts again, armed with slightly more wisdom. Repeat this process a thousand times, and you’ve captured the very mechanism that allows both animals and algorithms to adapt to their environments. To make this idea more tangible, imagine you’re training a puppy. The first time you say “sit,” the puppy has no clue what you mean. It might bark, jump, or wander off.
You try again, gently pressing it down, and when it finally sits, you reward it with a treat. That moment the connection between the action and the reward imprints a memory. The puppy realizes: sit = treat. After enough repetitions, it begins to sit automatically when it hears the word, anticipating the reward.

Now replace the puppy with an AI agent and the treat with a numerical signal. When the agent performs a desirable action, the environment gives it a positive reward. When it fails, it receives nothing or worse, a penalty. This simple system of incentives and consequences creates complex, intelligent behavior.
That’s what makes reinforcement learning so profound. Unlike supervised models that only interpret data or unsupervised models that only analyze it, reinforcement learning models live inside their data. They experiment, fail, adapt, and try again. Every mistake becomes part of their evolution.
At its core, RL sits at the intersection of control, decision-making, and curiosity. It bridges the gap between static pattern recognition and dynamic intelligence. And as you’ll see throughout this series, the same principles that helped AlphaGo master Go are the ones helping robots walk, drones navigate, and large language models like ChatGPT align their behavior with human values. Reinforcement learning isn’t just a branch of AI it’s the heartbeat of machines that learn to act.
What This Blog Will Give You
This blog isn’t about memorizing formulas or decoding walls of math it’s about understanding intelligence in motion.You’ll explore Reinforcement Learning (RL) not as an abstract concept, but as something alive a process you can see, tweak, and feel evolve right before your eyes.You’ll watch how curiosity becomes competence, how chaos turns into control, and how a few lines of Python can teach a machine to think, act, and adapt. Each post in this series will take you on a journey from intuition to implementation, from theory to experiment.
You’ll learn how algorithms like Q-Learning, Deep Q-Networks (DQN), and Proximal Policy Optimization (PPO)make decisions, improve through experience, and generalize their knowledge to entirely new challenges.But this won’t be a blog where you just read and nod.You’ll build, train, and observe coding agents that live and learn inside interactive environments like OpenAI Gym.
Imagine OpenAI Gym not as a simulation library, but as a vast digital ocean a world where agents learn to survive, explore, and adapt.Your agent is a small explorer drifting in these virtual waters.At first, it moves without purpose, colliding with invisible walls, tossed around by uncertainty.But with each episode, it begins to sense the currents the cause and effect of its own actions.Every misstep sends a ripple of feedback, every success adds a faint pattern to its memory.Slowly, these fragments of experience start forming something remarkable: a strategy.
You can imagine watching a graph rise beside it the reward curve, trembling at first with noise, then slowly stabilizing as the agent learns.That curve is the pulse of learning itself the mathematical heartbeat of curiosity transforming into competence.No single moment marks the breakthrough; instead, it’s a thousand small corrections that, together, form intelligence.
Let’s see that process in its simplest form Q-Learning.This is the foundation, the “hello world” of reinforcement learning.It captures the essence of the feedback loop: act, observe, and improve.In this small example, the agent must navigate the FrozenLake environment a slippery, treacherous world where one wrong step leads to failure.
import gym import numpy as np
Create the environment
env = gym.make(“FrozenLake-v1”, is_slippery=False)
Initialize the Q-table (state x action)
Q = np.zeros((env.observation_space.n, env.action_space.n))
Define hyperparameters
alpha = 0.8 # Learning rate gamma = 0.9 # Discount factor epsilon = 0.1 # Exploration rate
Training loop
for episode in range(1000): state, done = env.reset()[0], False while not done:
Epsilon-greedy strategy: explore or exploit
if np.random.rand() < epsilon: action = env.action_space.sample() # Explore the unknown else: action = np.argmax(Q[state]) # Use what we’ve learned
Step into the environment
next_state, reward, done, _, _ = env.step(action)
Bellman equation: the heart of learning
Q[state, action] += alpha * (reward + gamma * np.max(Q[next_state]) - Q[state, action])
Move to the next state
state = next_state
At the start, the agent knows nothing.It slips, falls, and fails over and over.Every episode is a new attempt, and every mistake leaves a trace in the Q-table, a memory of what not to do.The code above, though simple, embodies something profound: a model that improves itself without any explicit teacher.All it has are consequences rewards and penalties and through them, it constructs its own understanding of the world.

Now imagine this as a small boat in your ocean-themed OpenAI Gym world.In the first few trials, it drifts aimlessly, caught in the unpredictable tides of chance.But as time passes, the boat learns to read the sea turning at the right time, avoiding hidden rocks, and steering steadily toward its destination.No one is guiding it; there’s no map or compass.Its progress is entirely earned through experience.
That’s the quiet magic of reinforcement learning there are no shortcuts, no answers to memorize.Just an agent, an environment, and the unending rhythm of trial and error.Each episode, no matter how chaotic, brings it a little closer to mastery.
And while this story begins with a simple grid of ice, the same process plays out in games and worlds of every scale.In Atari classics like Pong and Breakout, RL agents learn reflexes sharper than any human player.In AlphaZero, they conquer Chess and Go from scratch not by mimicking humans, but by discovering entirely new strategies.In Dota 2 and StarCraft II, they learn cooperation, prediction, and resource management through billions of simulations, each one a small step forward in understanding.
These aren’t just game agents they’re digital explorers, proving the power of experience-based learning.The ocean never changes only the swimmers do.
The same principles that let an agent master a video game also enable robots to balance, drones to stabilize, and autonomous cars to navigate the real world.Reinforcement learning doesn’t memorize the rules of life it learns them by living inside the world’s feedback loop.
Through this series, you won’t just read about RL you’ll experience it.You’ll build your own learning systems, train them from scratch, and watch intelligence take shape in front of you.You’ll start with randomness, observe the rise of structure, and feel that subtle thrill when your first agent learns truly learns to succeed.
By the end, you won’t just know reinforcement learning.You’ll have witnessed it.You’ll have seen chaos transform into purpose not through code you wrote, but through the behavior your code inspired.And as your first agent reaches its goal whether on the frozen lake or in the deep blue of OpenAI Gym you’ll realize what makes this field so endlessly fascinating:it’s not about teaching a machine what to do…it’s about watching it figure it out.
# Roadmap for This Series
Now that you’ve seen what reinforcement learning feels like the trial, the feedback, the spark of learning it’s time to look ahead. This isn’t a one-off post. It’s a guided journey that takes you from the foundations of how machines learn to the point where you’ll be building and training your own intelligent agents. Each part builds on the last, carrying you step-by-step from theory to practice from the spark of an idea to working systems that actually learn and adapt.
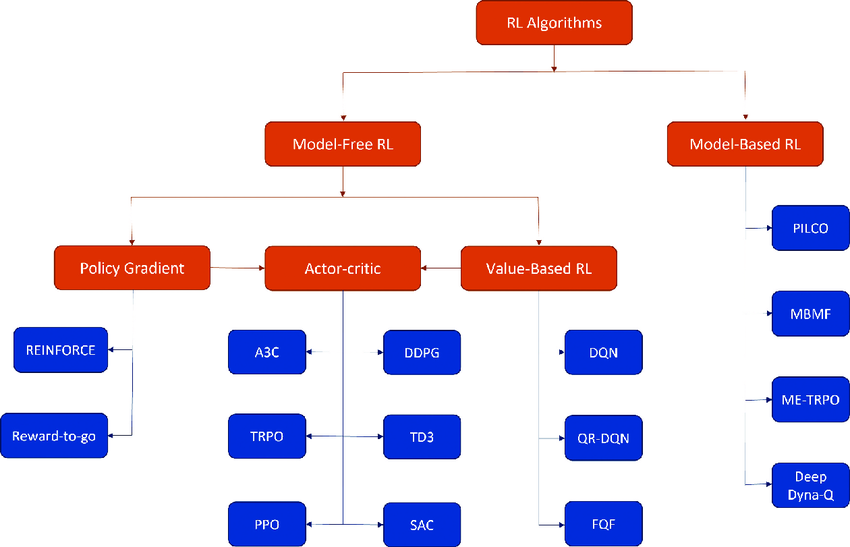
We’ll begin by revisiting the popular papers that shaped the world of RL, from AlphaGo and Deep Q-Networks (DQN)to Proximal Policy Optimization (PPO) and Soft Actor-Critic (SAC) the research breakthroughs that turned experimentation into revolution. From there, we’ll dive into the math and intuition behind the magic: the Bellman equations, value functions, and policy gradients that explain why reinforcement learning works at its core.
Then, we’ll get our hands dirty with code implementations. You’ll open up Python, explore OpenAI Gymenvironments, and experiment with frameworks like PyTorch. You’ll see how each line of code maps directly to the ideas you’ve just learned translating equations into actions, and actions into behavior.
Once the fundamentals are clear, we’ll step into interactive playgrounds where learning becomes visual and alive. You’ll tune rewards, test strategies, and watch your agents evolve in real time from clumsy beginners to capable problem-solvers. After that, we’ll explore the architectures that define modern RL, comparing methods like DQN, A3C, PPO, and SAC, and understanding when and why to use each one.
Finally, we’ll close with projects you can build from simple games to real-world control tasks. You’ll train agents to balance poles, navigate mazes, and even make decisions in more complex environments that mimic reality. By the end, you’ll have both the theory and the intuition and you’ll know what it feels like to teach a machine how to learn.
Imagine a timeline stretching from left to right starting with theory, flowing through intuition and code, and ending in creation. Each post is a milestone, a point where the abstract becomes real.
Throughout this journey, the tone will stay conversational, confident, and slightly cinematic like a guided documentary through the mind of an AI. We’ll move quickly where excitement builds, slow down where understanding deepens, and close each chapter with energy and momentum. This series is made for AI enthusiasts, developers, and researchers who want to see not just how reinforcement learning works, but how it feels to build it from the ground up.
So, ready? Let’s teach machines how to learn.
In the next Section , we’ll dive into the papers and discoveries that defined reinforcement learning tracing the evolution from AlphaGo to DeepMind’s DQN, and beyond.
# Popular RL Papers Q-Learning (Watkins, 1989): The Birth of Model-Free Control

Q-Learning (Watkins, 1989): The First Practical Model-Free Control Algorithm
In 1989, Christopher J. C. H. Watkins introduced a breakthrough in reinforcement learning: Q-Learning. It was the first practical algorithm that could learn optimal behavior purely from experience, without knowing how the world works underneath. This work, later formalized in Watkins & Dayan (1992), became the foundation of modern RL—from Deep Q-Networks (DQN) to AlphaGo.
The Problem: Learning to Act Without a Model
Reinforcement learning studies how an agent interacts with an environment to maximize cumulative reward. At each step the agent observes a state $s_t$, takes an action $a_t$, receives a reward $r_{t+1}$, and moves to a new state $s_{t+1}$. The challenge is to learn which actions are best even when the dynamics are unknown. Earlier methods depended on transition models $P(s’ \mid s, a)$ or Monte Carlo policy evaluation. Watkins proposed learning value estimates directly from experience—no model needed.
The Core Idea: Action-Value Learning
The optimal action-value function $Q^*(s,a)$ satisfies the Bellman optimality equation:
\[Q^*(s,a) = \mathbb{E}\!\left[\, r_{t+1} + \gamma \max_{a'} Q^*(s_{t+1}, a') \,\mid\, s_t=s,\, a_t=a \right].\]If $Q^*(s,a)$ were known, the optimal policy is simply
\[\pi^*(s) = \arg\max_{a} Q^*(s,a).\]Since $Q^*$ is unknown, Q-Learning approximates it from experience.
The Q-Learning Update Rule
Given a transition $(s_t,a_t,r_{t+1},s_{t+1})$, the update is:
\[Q(s_t,a_t) \leftarrow Q(s_t,a_t) + \alpha \big[ r_{t+1} + \gamma \max_{a'} Q(s_{t+1},a') - Q(s_t,a_t) \big].\]Here $\alpha$ is the learning rate and $\gamma$ the discount factor. The term $\max_{a’}Q(s_{t+1},a’)$ bootstraps from the next state. Q-Learning is off-policy: it learns the greedy target while following an exploratory policy such as $\varepsilon$-greedy (choose a random action with probability $\varepsilon$, otherwise the greedy one).
Convergence: Theory Behind the Magic
In tabular settings, if every state–action pair is visited infinitely often and learning rates $\alpha_t$ satisfy the Robbins–Monro conditions $\sum_t\alpha_t=\infty$ and $\sum_t\alpha_t^2<\infty$, then $Q(s,a)$ converges to $Q^*(s,a)$ with probability 1. This proved that optimal control can emerge purely from experience without knowing transition probabilities in advance.
Why It Changed Everything
Q-Learning removed the need for a model and enabled trial-and-error learning in unknown environments. It extended naturally to function approximators (neural nets, trees, etc.), inspiring Double Q-Learning, Dueling Networks, and Deep Q-Networks (DQN). DeepMind’s 2015 paper Human-level control through deep reinforcement learning built directly on this idea, combining Q-Learning with deep CNNs to achieve human-level Atari performance.
Citations
Watkins, C. J. C. H. (1989). Learning from Delayed Rewards, PhD Thesis, King’s College Cambridge.
Watkins & Dayan (1992). Q-learning. Machine Learning 8: 279–292.
Mnih et al. (2015). Human-level control through deep reinforcement learning. Nature 518: 529–533.
Practical Implementation: Python Snippet
Below is a simple tabular Q-Learning implementation suitable for a discrete OpenAI Gym/Gymnasium environment like FrozenLake or Taxi-v3.
import numpy as np
import gymnasium as gym
import random
def epsilon_greedy(Q, state, n_actions, epsilon):
if random.random() < epsilon:
return random.randint(0, n_actions - 1)
return int(np.argmax(Q[state]))
def q_learning(env, episodes=2000, alpha=0.1, gamma=0.99,
epsilon=1.0, epsilon_decay=0.995, epsilon_min=0.05):
n_actions = env.action_space.n
n_states = env.observation_space.n
Q = np.zeros((n_states, n_actions))
for ep in range(episodes):
state, _ = env.reset()
done = False
while not done:
action = epsilon_greedy(Q, state, n_actions, epsilon)
next_state, reward, terminated, truncated, _ = env.step(action)
done = terminated or truncated
# Q-learning update (Watkins, 1989)
best_next = np.max(Q[next_state])
td_target = reward + gamma * best_next
td_error = td_target - Q[state, action]
Q[state, action] += alpha * td_error
state = next_state
epsilon = max(epsilon_min, epsilon * epsilon_decay)
return Q
# Example run
env = gym.make("FrozenLake-v1", is_slippery=False)
Q = q_learning(env)
print("Learned Q-table:")
print(Q)
Key takeaway: Each line of the update rule is a direct numerical realization of Watkins’ Bellman equation.
Visualizing the Bellman Equation
Think of it as a self-consistent equation for the universe of optimal decisions:
┌───────────────────────────────┐
│ Current state–action: (s, a) │
└───────────────────────────────┘
│
▼
Take action → Receive reward r
│
▼
Next state s' → Evaluate best future value max_a' Q(s', a')
│
▼
Combine → r + γ * max_a' Q(s', a')
│
▼
Update Q(s,a) ← Old Q(s,a) + α * (Target − Old)
This bootstrapping is what allows an agent to learn long-term outcomes from immediate experiences.
Limitations and Later Improvements
Although elegant, Watkins’ formulation had some practical challenges:
| Limitation | Solution |
|---|---|
| Over-estimation bias from max operator | Double Q-Learning |
| Slow convergence in large spaces | Function approximation (Deep Q-Networks) |
| Poor exploration | Entropy regularization / ε decay / Soft-Q |
| Instability with neural networks | Experience Replay + Target Networks (DQN) |
These refinements show how Q-Learning served as the seed for an entire field of algorithms.
Watkins’ 1989 thesis “Learning from Delayed Rewards” was a quiet revolution.It formalized the dream of learning purely from interaction without explicit teaching or supervision.Every RL agent today, from game-playing AIs to autonomous vehicles, still whispers the same update rule at its core.
Deep Q-Networks (DQN, DeepMind 2015): Bridging Perception and Control
In 2015, Volodymyr Mnih et al. at DeepMind achieved one of the most defining milestones in AI: they scaled Watkins’ Q-Learning into the high-dimensional world of raw perception using deep convolutional neural networks (CNNs). This system known as the Deep Q-Network (DQN) learned to play 49 Atari 2600 games directly from pixels, sometimes surpassing human performance.It marked the first time a single algorithm could see, act, and improve without any game-specific engineering.
Historical Context: Why the Atari Breakthrough Mattered
Before 2015, RL was largely confined to simple, low-dimensional domains — mazes, grids, or robotic joints where the state space could be enumerated.But perception-based environments (images, video) posed a fatal scaling problem: tabular Q-Learning explodes combinatorially with each new pixel dimension.
DeepMind’s DQN changed that by introducing representation learning.The network didn’t just store Q-values — it understood spatial and temporal regularities from pixels.

From Tabular to Deep Q-Learning
a) Classical Q-Learning recap
\[Q(s,a) \leftarrow Q(s,a) + \alpha \Big[r + \gamma \max_{a'} Q(s',a') - Q(s,a)\Big]\]This update iteratively drives $Q$ toward the Bellman optimality fixed point. In tabular settings, every $(s,a)$ pair has its own entry.
b) DQN’s key idea — function approximation
Replace the table with a neural network $Q(s,a;\,\theta)$ and train by minimizing a squared temporal-difference loss with a target network:
\[L(\theta) \;=\; \Big(r + \gamma \max_{a'} Q(s',a';\,\theta^-) \;-\; Q(s,a;\,\theta)\Big)^2\]Here $\theta$ are the parameters of the online network, and $\theta^-$ those of the target network. Gradients of $L$ backpropagate through the convolutional layers, enabling the agent to generalize across similar states.
Stabilization Mechanisms — The Hidden Genius
Naively combining Q-Learning with neural nets quickly diverges.DeepMind introduced two elegant yet powerful fixes:
| Technique | Problem Solved | Mechanism |
|---|---|---|
| Experience Replay | Temporal correlation between samples | Store past transitions (s,a,r,s’) → sample random mini-batches to approximate i.i.d. data |
| Target Network | Moving targets destabilize gradient updates | Freeze a copy Q(s,a;θ⁻) for N steps → periodically sync with online network |
Together, these created a stable, data-efficient RL pipeline that finally made deep RL feasible.
Architecture and Training Loop
The DQN used a three-layer CNN to process stacked frames (84 × 84 pixels × 4).Outputs were Q-values for each discrete action (typically 18 Atari controls).
Simplified Deep Q-Learning loop
q_net = CNN_QNetwork()
target_net = copy.deepcopy(q_net)
replay = deque(maxlen=100000)
epsilon = 1.0
for step in range(total_steps):
a = env.action_space.sample() if random.random() < epsilon else np.argmax(q_net(s))
s2, r, done, _ = env.step(a)
replay.append((s, a, r, s2, done))
# Sample random batch
batch = random.sample(replay, 32)
targets = []
for s_b, a_b, r_b, s2_b, d_b in batch:
y = r_b if d_b else r_b + gamma * np.max(target_net(s2_b))
q_vals = q_net(s_b)
q_vals[a_b] = y
targets.append(q_vals)
q_net.train_on_batch(batch_states, targets)
if step % 10000 == 0:
target_net.load_state_dict(q_net.state_dict())
Training ran for 50 million frames per game, updating every four steps with γ = 0.99 and RMSProp optimizer.Exploration ε decayed from 1.0 → 0.1 over 1 M frames.
Emergent Behavior — Breakout and Beyond
Initially, the agent flails randomly; after ~200 k steps it learns to hit the ball; by 1 M steps it discovers tunneling carving a hole through bricks to trap the ball above the wall for infinite reward.
Such emergent behavior illustrated that reward driven learning could produce human-like ingenuity.
Results and Impact
Across 49 Atari titles, DQN achieved a median human-normalized score of 121% beating humans in many games like Breakout, Enduro, and Seaquest.Performance was consistent without any hyperparameter tuning per game.

This was the first demonstration that a general RL agent could learn complex tasks directly from raw sensory input.
Beyond DQN — Its Legacy
DQN’s success sparked a wave of descendants that remain core to modern AI systems:
| Successor | Core Idea | Year |
|---|---|---|
| Double DQN | Decouples action selection and evaluation to reduce over-estimation bias | 2016 |
| Dueling DQN | Separates state value and advantage streams for better generalization | 2016 |
| Prioritized Replay | Samples high-TD-error experiences more often | 2016 |
| Rainbow DQN | Combines six improvements (Double, Dueling, NoisyNets, etc.) | 2017 |
| AlphaGo / AlphaZero / MuZero | Integrate Q-value estimation into Monte Carlo Tree Search | — |
These models now power applications in robotics, game AI, finance, and autonomous control.
Conceptual Summary
Policy Gradient Methods (Williams, 1992; REINFORCE)
What Policy Gradients Optimize (High-Level)
Policy Gradient (PG) methods optimize the expected return directly by adjusting the parameters of a stochastic policy $\pi_\theta(a \mid s)$. Using the likelihood-ratio trick, the vanilla REINFORCE gradient is:
\[\nabla_\theta J(\theta) = \mathbb{E}_{\pi_\theta}\!\left[\nabla_\theta \log \pi_\theta(a_t\mid s_t) \, R_t \right].\]This increases the probability of actions that produced high returns — effectively a form of reward-weighted imitation. The key conceptual win over Q-learning–style methods is that policy gradients naturally support continuous actions and differentiable policies.
(www-anw.cs.umass.edu) Why PG Methods Matter (Context & Impact)
Before PG, many RL successes were value-based and mainly discrete. PG unlocked robotics/locomotion and modern actor-critic families (A2C/A3C, TRPO, PPO, SAC) by optimizing distributions over actions rather than action values. (spinningup.openai.com)
Intuition + Variance Reduction
REINFORCE updates are simple but high-variance (episode-level credit assignment). Subtracting a baseline $b(s)$ leaves the expectation unbiased yet reduces variance:
\[\nabla_\theta J(\theta) = \mathbb{E}_{\pi_\theta}\!\left[\nabla_\theta \log \pi_\theta(a_t\mid s_t)\,\big(R_t - b(s_t)\big)\right].\]Choosing $b(s) = V^\pi(s)$ yields the advantage function $A^\pi(s,a) = Q^\pi(s,a) - V^\pi(s)$ — a cornerstone of modern policy gradient methods such as Generalized Advantage Estimation (GAE) in PPO and TRPO.
(papers.neurips.cc) Takeaway: Use advantage estimates (not raw returns) to reduce variance and stabilize learning.
Derivation (Sketch)
Objective
\[J(\theta) = \mathbb{E}_{\tau \sim \pi_\theta}\!\left[\sum_t \gamma^t r_t\right].\]Apply log-derivative trick
\[\nabla_\theta p_\theta(\tau) = p_\theta(\tau)\sum_t \nabla_\theta \log \pi_\theta(a_t\mid s_t).\]Exchange gradient and expectation to obtain REINFORCE
This leads directly to the policy gradient estimator underlying REINFORCE.
Use causality
At time $t$, only future rewards contribute to the gradient—past rewards are irrelevant (“don’t let the past distract you”).
Subtract a baseline
Subtracting any baseline independent of $a_t$ yields an unbiased but lower-variance estimator. The advantage function then emerges naturally as a centered return signal.
(spinningup.openai.com) Practical Tricks (That Actually Help)
Normalize returns and advantages per batch
Standardizing advantages within each batch helps stabilize learning and prevents excessively large gradients.
Entropy bonus
| Add an entropy regularization term $\beta \,\mathcal{H}(\pi_\theta(\cdot | s))$ to encourage exploration and avoid premature convergence to deterministic policies. |
Clipping and learning rate scheduling
Use gradient clipping and learning rate warmups to control instability and smooth early training dynamics.
Longer batches
Collecting more trajectories per update reduces variance of gradient estimates and improves stability at the cost of slower updates.
Logging and monitoring
Track moving averages of episodic return and key loss components (policy loss, entropy loss, value loss). Logging helps diagnose instability and detect performance regressions.
(Proceedings of Machine Learning Research) If you prefer a learning-curve image, generate it from the code below (average episodic return vs. episodes) and embed it as Figure 3.5.
Pseudocode (REINFORCE with Baseline)
Initialize θ; optional value net Vψ(s)
repeat for each iteration:
D ← ∅
for k in 1..num_episodes_per_batch:
τ ← rollout πθ in env → {s_t, a_t, r_t}
D ← D ∪ τ
For each τ in D: compute discounted returns G_t
If using baseline:
Ā_t ← G_t − Vψ(s_t) # advantage estimate
Update ψ by minimizing (Vψ(s_t) − G_t)^2
else:
Ā_t ← (G_t − mean(G)) / std(G)
Update θ by ascending ∑_t log πθ(a_t\mid s_t) · Ā_t + β·H[πθ(·\mid s_t)]
until solved
PyTorch Snippet — Discrete Actions (CartPole)
# REINFORCE on CartPole-v1 (discrete) — minimal, clear
import gym, torch, torch.nn as nn, torch.optim as optim
class Policy(nn.Module):
def __init__(self, obs_dim=4, act_dim=2):
super().__init__()
self.net = nn.Sequential(
nn.Linear(obs_dim, 128), nn.ReLU(),
nn.Linear(128, act_dim), nn.Softmax(dim=-1)
)
def forward(self, x): return self.net(x)
env = gym.make("CartPole-v1")
pi = Policy(); opt = optim.Adam(pi.parameters(), lr=1e-2)
gamma, entropy_coef = 0.99, 0.01
for ep in range(600):
s, _ = env.reset()
logps, rews, ents = [], [], []
done = False
while not done:
s_t = torch.tensor(s, dtype=torch.float32)
probs = pi(s_t); dist = torch.distributions.Categorical(probs)
a = dist.sample()
s, r, done, _, _ = env.step(a.item())
logps.append(dist.log_prob(a))
ents.append(dist.entropy())
rews.append(r)
# discounted returns
G, R = 0.0, []
for r in reversed(rews):
G = r + gamma * G
R.insert(0, G)
R = torch.tensor(R, dtype=torch.float32)
R = (R - R.mean()) / (R.std() + 1e-8) # baseline via normalization
loss = -(torch.stack(logps) * R).sum() - entropy_coef * torch.stack(ents).sum()
opt.zero_grad(); loss.backward(); opt.step()
if ep % 50 == 0:
print(f"Episode {ep} \mid loss {loss.item():.3f} \mid return {sum(rews):.1f}")
Why this works: REINFORCE uses Monte-Carlo returns and a (normalized) baseline; an entropy bonusprevents premature collapse.
PyTorch Snippet — Continuous Actions (Pendulum or MountainCarContinuous)
This shows a Gaussian policy with learnable mean and log-std. For simplicity, we clamp actions to env bounds (tanh-squash with proper log-prob correction is more exact but longer).
# REINFORCE for continuous control (Gaussian policy)
import gym, torch, torch.nn as nn, torch.optim as optim
import numpy as np
env = gym.make("Pendulum-v1") # continuous action in [-2, 2]
obs_dim = env.observation_space.shape[0]
act_dim = env.action_space.shape[0]
act_low = torch.tensor(env.action_space.low, dtype=torch.float32)
act_high = torch.tensor(env.action_space.high, dtype=torch.float32)
class GaussianPolicy(nn.Module):
def __init__(self):
super().__init__()
self.body = nn.Sequential(
nn.Linear(obs_dim, 128), nn.Tanh(),
nn.Linear(128, 128), nn.Tanh()
)
self.mu = nn.Linear(128, act_dim)
self.log_std = nn.Parameter(torch.zeros(act_dim)) # global log-std
def forward(self, s):
h = self.body(s)
mu = self.mu(h)
std = torch.exp(self.log_std)
return mu, std
pi = GaussianPolicy()
opt = optim.Adam(pi.parameters(), lr=3e-4)
gamma, entropy_coef = 0.99, 1e-3
for ep in range(800):
s, _ = env.reset()
logps, rews, ents = [], [], []
done = False
while not done:
s_t = torch.tensor(s, dtype=torch.float32)
mu, std = pi(s_t)
dist = torch.distributions.Normal(mu, std)
a = dist.sample() # sample from Gaussian policy
a_env = torch.clamp(a, act_low, act_high) # simple bounding
ns, r, done, _, _ = env.step(a_env.detach().numpy())
logps.append(dist.log_prob(a).sum())
ents.append(dist.entropy().sum())
rews.append(float(r))
s = ns
# discounted returns + normalize (baseline)
G, R = 0.0, []
for r in reversed(rews):
G = r + gamma * G
R.insert(0, G)
R = torch.tensor(R, dtype=torch.float32)
R = (R - R.mean()) / (R.std() + 1e-8)
loss = -(torch.stack(logps) * R).sum() - entropy_coef * torch.stack(ents).sum()
opt.zero_grad(); loss.backward(); opt.step()
if ep % 50 == 0:
print(f"[Cont] Episode {ep} \mid return {sum(rews):.1f}")
Note: For production-grade continuous PG, prefer actor-critic (with learned (V_\psi)), GAE, and proper tanh-squash log-prob correction. SAC adds max-entropy objectives to further stabilize/encourage exploration. (Proceedings of Machine Learning Research)
Debugging & Evaluation (What to Watch)
Learning curves: plot average episodic return (sliding window 50–100 eps).
Entropy: should decline gradually (too fast ⇒ stuck; too slow ⇒ wandering).
Variance: if unstable, increase batch size (more episodes per update), reduce LR, or improve baseline (learn (V_\psi)).
Sanity checks: random policy baseline; seed reproducibility; verify action scaling for continuous envs.
Where This Leads (Modern PG)
A2C/A3C: lower variance with learned critic; parallelism for speed.
TRPO/PPO: constrain updates (trust regions/clipping) to avoid destructive steps.
SAC: off-policy + maximum entropy with strong stability in continuous control. (spinningup.openai.com)
Actor–Critic Methods (A3C, 2016)
The Actor Critic framework represents one of the most elegant and transformative ideas in reinforcement learning the unification of two paradigms that had long evolved separately: policy-based methods and value-based methods. Before its introduction, algorithms either focused on learning a value function (like Q-learning and DQN) or directly optimizing a policy (like REINFORCE and vanilla policy gradients). Each came with advantages and limitations. Value-based methods were data-efficient but unstable in continuous action spaces, while policy-based methods handled continuous domains naturally but suffered from high variance and slow convergence.
The introduction of the Actor–Critic model in the early 2000s provided a hybrid that could learn efficiently in both settings, and it was later refined into one of the most practical, high-performance reinforcement learning architectures: the Asynchronous Advantage Actor–Critic (A3C) algorithm, developed by Volodymyr Mnih and colleagues at DeepMind in 2016.
A3C quickly became one of the most influential algorithms in modern RL history — a design so effective that nearly every advanced RL method that followed, including A2C, PPO, and SAC, builds on its principles.
The Intuition Behind Actor–Critic
At its heart, the Actor–Critic method introduces two learning systems that work in tandem. The actor is responsible for deciding what to do — it learns a policy $\pi_\theta(a\mid s)$ that defines a probability distribution over actions given a state. The critic, on the other hand, evaluates how good that decision was — it estimates the value function $V_w(s)$, which represents the expected future reward from that state.
This design addresses one of the biggest weaknesses of pure policy gradient methods like REINFORCE: the instability caused by high variance in return estimates. REINFORCE updates its policy only after an episode ends, basing the gradient entirely on the cumulative return, which can fluctuate wildly between runs. By incorporating a critic that estimates the value of each state, Actor–Critic methods can adjust the policy using a much more stable signal: the advantage function, which measures how much better an action performed compared to the critic’s expectation.
Mathematically, this update can be expressed as:
\[\nabla_\theta J(\theta) \;=\; \mathbb{E}_{\pi_\theta}\!\Big[\, \nabla_\theta \log \pi_\theta(a_t\mid s_t)\, \big(R_t - V_w(s_t)\big) \,\Big]\,,\]where $R_t$ is the return and $V_w(s_t)$ is the critic’s value estimate. The term $\big(R_t - V_w(s_t)\big)$ is known as the advantage — a measure of relative performance that stabilizes updates and reduces noise in the learning process.
This two-network dynamic is powerful: the actor pushes the policy toward actions that improve expected return, while the critic grounds those updates in context, providing smoother and more reliable gradient feedback.
The Innovation of A3C
Although the Actor Critic structure had existed before A3C, DeepMind’s version revolutionized the architecture through asynchronous parallelization.
In earlier methods like DQN or Advantage Actor Critic (A2C), the agent interacted with the environment sequentially. This sequential interaction introduced correlations between states and actions leading to instability and inefficient exploration. A3C broke this bottleneck by launching multiple independent agents (workers) in parallel, each running its own copy of the environment.
Each worker maintains a local copy of the model that interacts with the environment, collects trajectories, and periodically sends gradient updates to a shared global network. This global model aggregates updates asynchronously from all workers.
The result was extraordinary. Instead of needing powerful GPUs, A3C could achieve state-of-the-art performance on dozens of Atari games using only CPUs. The asynchronous design not only accelerated learning (by making better use of computational resources) but also introduced diversity into experience collection. Each worker explores different parts of the environment, reducing correlation in training data and enhancing the robustness of the learned policy.

Each worker interacts with its own environment instance and periodically updates a global shared network asynchronously. The global model accumulates gradients from multiple environments, leading to faster convergence and more stable updates.
The Mathematics of A3C
The A3C model builds upon the actor–critic structure with an important enhancement — the Advantage function $A(s_t, a_t) = R_t + \gamma V(s_{t+1}) - V(s_t)$. This term allows the network to assess how much better an action was compared to the expected value at that state. The total loss in A3C combines three components:
Actor Loss
Encourages actions that improve the policy:
\[L_{\text{actor}} = -\log \pi_\theta(a_t\mid s_t)\, A(s_t, a_t)\]Critic Loss
Minimizes the error in the value function:
\[L_{\text{critic}} = (R_t - V(s_t))^2\]Entropy Loss
Maintains policy diversity and avoids early convergence:
\[L_{\text{entropy}} = -\beta\, H(\pi_\theta)\]Total Loss
These components are combined into a total loss:
\[L = L_{\text{actor}} + c_v L_{\text{critic}} - c_H L_{\text{entropy}}\]The entropy term $H(\pi_\theta)$ acts as a regularizer that encourages the policy to remain uncertain when appropriate, promoting exploration and preventing the network from converging prematurely to suboptimal deterministic policies.
Implementation Walkthrough
Below is a simplified single-threaded implementation of A3C in PyTorch. While true A3C operates asynchronously with multiple workers running in parallel, this version captures the essence of the method in a self-contained example that can run on a single machine.
import torch
import torch.nn as nn
import torch.optim as optim
import gym
class ActorCritic(nn.Module):
def __init__(self, state_dim, action_dim):
super().__init__()
self.shared = nn.Sequential(nn.Linear(state_dim, 128), nn.ReLU())
self.actor = nn.Linear(128, action_dim)
self.critic = nn.Linear(128, 1)
def forward(self, state):
x = self.shared(state)
probs = torch.softmax(self.actor(x), dim=-1)
value = self.critic(x)
return probs, value
env = gym.make("CartPole-v1")
model = ActorCritic(4, 2)
optimizer = optim.Adam(model.parameters(), lr=0.001)
gamma, value_coef, entropy_coef = 0.99, 0.5, 0.01
for episode in range(1000):
state, _ = env.reset()
log_probs, values, rewards, entropies = [], [], [], []
done = False
while not done:
state_tensor = torch.tensor(state, dtype=torch.float32)
probs, value = model(state_tensor)
dist = torch.distributions.Categorical(probs)
action = dist.sample()
next_state, reward, done, _, _ = env.step(action.item())
log_probs.append(dist.log_prob(action))
values.append(value)
rewards.append(reward)
entropies.append(dist.entropy())
state = next_state
returns, R = [], 0
for r in reversed(rewards):
R = r + gamma * R
returns.insert(0, R)
returns = torch.tensor(returns, dtype=torch.float32)
values = torch.cat(values)
advantages = returns - values.squeeze()
actor_loss = -(torch.stack(log_probs) * advantages.detach()).sum()
critic_loss = advantages.pow(2).sum()
entropy_loss = -torch.stack(entropies).sum()
loss = actor_loss + value_coef * critic_loss + entropy_coef * entropy_loss
optimizer.zero_grad()
loss.backward()
optimizer.step()
if episode % 50 == 0:
print(f"Episode {episode}: Loss = {loss.item():.3f}, Return = {sum(rewards)}")
This simple version demonstrates the dual-network architecture in action. The shared layers extract state features, which then branch into the actor (policy head) and the critic (value head). The actor samples an action, the critic evaluates it, and the advantage function determines how much the actor should adjust its behavior. Over time, the network learns both to predict values accurately and to favor beneficial actions.
The asynchronous version expands this logic across multiple worker processes, each maintaining local gradients that are periodically merged into a global model. This design enables A3C to fully exploit the computational power of multicore CPUs, resulting in up to 10× faster learning and more stable convergence compared to DQN and vanilla policy gradients.
Why A3C Was a Milestone
The impact of A3C cannot be overstated. It introduced a practical blueprint for scaling reinforcement learning across multiple environments, breaking the reliance on GPUs and replay buffers. It showed that robust, human-level performance could be achieved using simple architectures powered by parallel computation.
Its asynchronous updates acted as a form of implicit regularization, reducing the overfitting and instability often observed in on-policy methods. Moreover, the idea of computing the advantage and the use of entropy bonuses became standard across nearly all subsequent algorithms. In short, A3C was the bridge between early deep RL methods and the modern policy optimization era.
Beyond A3C: The Road to PPO and SAC
Following A3C, researchers introduced A2C (Advantage Actor–Critic) a synchronous version that updated all workers simultaneously, making it easier to parallelize on GPUs. Later, Proximal Policy Optimization (PPO) refined this further by introducing clipped objectives to prevent large destructive updates, leading to even more stable performance.
Meanwhile, Soft Actor Critic (SAC) extended the Actor Critic design to continuous domains using off-policy learning and maximum entropy objectives for better exploration. These later methods all trace their conceptual lineage back to the Actor–Critic framework and the asynchronous brilliance of A3C.
GitHub and Reference Material
For practical implementations, you can explore the official PyTorch examples, which include a fully functional Actor–Critic and A3C setup for environments like CartPole and Pong. DeepMind’s original TensorFlow code and OpenAI’s Baselines library also provide detailed implementations and performance benchmarks.
GitHub Links:
PyTorch: Actor–Critic Implementation
DeepMind: A3C and ACER Repository https://github.com/Kaixhin/ACER
OpenAI Baselines: A2C/A3C Implementation https://github.com/openai/baselines/tree/master/baselines/a2c
Proximal Policy Optimization (PPO, 2017)
The Need for Stable Policy Optimization
By 2016, policy-gradient methods had matured through A3C’s introduction of asynchronous updates and baseline critics, yet they remained fragile. A single large policy update could cause catastrophic performance collapse, especially when training complex neural networks in continuous environments. The core problem was that vanilla policy gradients and even trust-region methods like TRPO (Trust Region Policy Optimization, 2015) required second-order approximations and were computationally heavy.
Proximal Policy Optimization (PPO), proposed by John Schulman et al. (2017) at OpenAI, offered a simple yet powerful alternative. It preserved the reliability of TRPO while remaining computationally efficient and easy to implement. PPO became the default policy-optimization method for OpenAI’s research and was later used in a wide range of their flagship projects from OpenAI Five (Dota 2) to Dactyl (robotic hand manipulation) to the fine-tuning processes that guided GPT and InstructGPT training.
The Core Idea
The goal of Proximal Policy Optimization (PPO) is to make policy updates trustworthy and consistent. Instead of taking large, unstable gradient steps, PPO restricts how much the new policy can deviate from the old one.
Let $\pi_\theta(a \mid s)$ be the current policy and $\pi_{\text{old}}(a \mid s)$ the previous policy. We define the probability ratio:
\[r_t(\theta) = \frac{\pi_\theta(a_t\mid s_t)}{\pi_{\text{old}}(a_t\mid s_t)}\]This ratio measures how much the new policy has changed its probability of taking the same action in the same state. The objective is then to maximize the expected advantage, but with a clip to prevent too large of a policy shift:
\[L^{\text{CLIP}}(\theta) = \mathbb{E}_t\!\left[\min\left(r_t(\theta) A_t,\; \text{clip}\big(r_t(\theta),\, 1-\epsilon,\, 1+\epsilon\big) A_t\right)\right]\]Here $\epsilon$ is a small constant (typically 0.1–0.2) that bounds the step size. If the new policy attempts to change too much, the clipped term prevents further increase in the objective value, thereby keeping updates proximal to the old policy.
This seemingly minor change had massive impact: it combined the stability of TRPO with the simplicity of REINFORCE — all without requiring second-order derivatives or complex constraints.
Why It Worked
PPO brought a level of practical reliability that made deep reinforcement learning trainable on large-scale tasks. Its balance between exploration and trust-region control allowed researchers to train massive agents safely. It became the foundation of OpenAI’s entire RL stack from game agents to language models.
OpenAI Five (2018) used PPO to train neural policies controlling five Dota 2 heroes, scaling to thousands of simulated matches per day across hundreds of workers.
Dactyl (2018) employed PPO to train a robotic hand to manipulate a cube purely in simulation before transferring to a real-world robot.
InstructGPT and ChatGPT later used PPO in the RLHF stage (Reinforcement Learning from Human Feedback) to fine-tune language models based on human preferences and ranking data.
These projects cemented PPO as a cornerstone algorithm for safe, scalable, and high-performance policy learning. OpenAI described it as “our go-to algorithm for virtually all reinforcement learning problems.”
Mathematical Perspective
The PPO loss function balances three objectives: the clipped surrogate objective, the value function loss, and an entropy bonus for exploration.
\[L^{\text{PPO}}(\theta) = \mathbb{E}_t \Big[ L^{\text{CLIP}}(\theta) - c_1 (V_\theta(s_t) - R_t)^2 + c_2 \, H[\pi_\theta(\cdot\mid s_t)] \Big].\]Here, $c_1$ and $c_2$ are coefficients that balance value function accuracy and entropy regularization. This formulation shows how PPO jointly optimizes for return maximization while maintaining diversity and value accuracy — a three-way harmony between stability, exploration, and performance.
Implementation in Practice (Python)
Below is a concise PyTorch implementation illustrating the core logic of PPO. It operates on a discrete environment like CartPole and uses mini-batch optimization over trajectories collected by the current policy.
import torch, torch.nn as nn, torch.optim as optim
import gym
from torch.distributions import Categorical
class PPOAgent(nn.Module):
def __init__(self, state_dim, action_dim):
super().__init__()
self.fc = nn.Sequential(nn.Linear(state_dim, 128), nn.ReLU())
self.policy = nn.Linear(128, action_dim)
self.value = nn.Linear(128, 1)
def forward(self, x):
x = self.fc(x)
probs = torch.softmax(self.policy(x), dim=-1)
v = self.value(x)
return probs, v
env = gym.make("CartPole-v1")
agent = PPOAgent(4, 2)
opt = optim.Adam(agent.parameters(), lr=3e-4)
eps_clip, gamma, value_coeff, entropy_coeff = 0.2, 0.99, 0.5, 0.01
for update in range(500):
logps, vals, rews, acts, states = [], [], [], [], []
s, _ = env.reset()
done = False
while not done:
s_t = torch.tensor(s, dtype=torch.float32)
probs, v = agent(s_t)
dist = Categorical(probs)
a = dist.sample()
ns, r, done, _, _ = env.step(a.item())
logps.append(dist.log_prob(a))
vals.append(v)
rews.append(r)
acts.append(a)
states.append(s_t)
s = ns
# compute discounted returns
R, returns = 0, []
for r in reversed(rews):
R = r + gamma * R
returns.insert(0, R)
returns = torch.tensor(returns, dtype=torch.float32)
vals = torch.cat(vals).squeeze()
adv = returns - vals.detach()
adv = (adv - adv.mean()) / (adv.std() + 1e-8)
# old policy probabilities
old_logps = torch.stack(logps).detach()
for _ in range(4): # PPO update epochs
probs, vals_new = agent(torch.stack(states))
dist = Categorical(probs)
new_logps = dist.log_prob(torch.stack(acts))
ratio = (new_logps - old_logps).exp()
surr1 = ratio * adv
surr2 = torch.clamp(ratio, 1 - eps_clip, 1 + eps_clip) * adv
actor_loss = -torch.min(surr1, surr2).mean()
critic_loss = (returns - vals_new.squeeze()).pow(2).mean()
entropy = dist.entropy().mean()
loss = actor_loss + value_coeff * critic_loss - entropy_coeff * entropy
opt.zero_grad()
loss.backward()
opt.step()
if update % 50 == 0:
print(f"Update {update}: loss={loss.item():.3f}, return={sum(rews)}")
This implementation demonstrates the essence of PPO: the ratio ( r_t ), the clipping mechanism, the advantage function, and the dual optimization of policy and value heads. It shows why PPO is both stable and simple enough to serve as a default algorithm in modern RL frameworks.
PPO in OpenAI Research
PPO became the engine behind some of OpenAI’s most iconic achievements. In OpenAI Five, agents trained with PPO played millions of Dota 2 matches to reach professional skill levels. The algorithm enabled fine-grained control over learning rates and policy stability across hundreds of simulations running in parallel. In Dactyl, PPO allowed a robot hand to master cube rotation using simulated experience and domain randomization before transferring to the real world a milestone in sim-to-real transfer. Later, during the development of InstructGPT, OpenAI reused PPO in a different context: instead of game scores or physical rewards, the agent optimized for human feedback through a reward model trained on annotator preferences. This innovation laid the foundation for the alignment techniques that power ChatGPT today.
The common thread through all these projects was PPO’s reliability. It allowed OpenAI to scale up policy optimization without fear of collapse or instability something no previous algorithm offered with the same ease.
Why PPO Became the Default
The beauty of PPO lies in its simplicity. It can be implemented in less than 200 lines of Python, yet achieves competitive performance with algorithms that took years to develop. It requires no complex Lagrange multipliers, no second-order Hessians, and no matrix inversions. Despite its simplicity, it achieves consistent and robust results across a wide range of tasks from robotics to language model fine-tuning. For many researchers, PPO was the moment when reinforcement learning became reliable enough to be practical.
The Math & Intuition of Reinforcement Learning
Reinforcement Learning (RL) studies how an agent should act in an environment to maximize long-term reward. The mathematics gives a compact language for this story; the intuition makes the symbols feel inevitable. Keep the picture of a maze or tic-tac-toe in mind: each move nudges you toward or away from a win, and the math formalizes how those nudges accumulate.
Layer 1 MDPs: the world as state, action, reward
An RL problem is modeled as a Markov Decision Process: $\text{MDP}=(S,A,P,R,\gamma)$. Here $S$ is the set of states, $A$ the actions, $P(s’\mid s,a)$ the transition law, $R(s,a)$ the reward, and $\gamma \in [0,1]$ the discount that down-weights distant outcomes. A policy $\pi(a\mid s)$ maps a state to a distribution over actions.
The agent’s objective is to maximize expected return:
\[G_t = \sum_{k=0}^{\infty} \gamma^k r_{t+k+1}\]Formally, we seek a policy $\pi^*$ that maximizes:
\[J(\pi) = \mathbb{E}_{\pi}\left[\sum_{t \ge 0} \gamma^t r_{t+1}\right]\]under the environment dynamics.
How to solve it: specify $S, A, P, R, \gamma$ for your task; choose whether to compute exact values with a known model $P$ (dynamic programming) or learn from data when $P$ is unknown (temporal-difference and policy gradient methods). That fork — planning vs. learning — determines everything that follows.
Layer 2 Bellman equations: recursive value reasoning
For a fixed policy $\pi$, the state-value function satisfies
\[V^{\pi}(s) = \mathbb{E}_{a\sim\pi,\, s'\sim P}\!\left[r(s,a) + \gamma\, V^{\pi}(s')\right].\]The action-value function satisfies
\[Q^{\pi}(s,a) = \mathbb{E}_{s'\sim P}\!\left[r(s,a) + \gamma\, \mathbb{E}_{a'\sim\pi}Q^{\pi}(s',a')\right].\]For optimal control (Bellman optimality), remove $\pi$ by taking a max:
\[V^*(s) = \max_{a}\, \mathbb{E}_{s'\sim P}\!\left[r(s,a) + \gamma\, V^*(s')\right], \qquad Q^*(s,a) = \mathbb{E}_{s'\sim P}\!\left[r(s,a) + \gamma\, \max_{a'} Q^*(s',a')\right].\]These recursions express a simple intuition: the value of “here” equals reward now plus the discounted value of “where you’ll land.” In a maze, squares adjacent to the exit inherit high value; value then “flows backward” across the grid by these equations (Bellman, 1957).
How to solve it in practice: if the model $P$ is known, you can iterate to convergence. For policy evaluation, initialize $V_0$ arbitrarily and update
\[V_{k+1}(s)=\sum_{a}\pi(a\mid s)\sum_{s'} P(s'\mid s,a)\,\big[\,R(s,a)+\gamma\,V_k(s')\,\big].\]Improve the policy greedily via
\[\pi_{k+1}(s)=\arg\max_{a}\ \sum_{s'} P(s'\mid s,a)\,\big[\,R(s,a)+\gamma\,V_k(s')\,\big],\]and alternate these two steps (policy iteration). Or collapse them into value iteration:
\[V_{k+1}(s)=\max_{a}\ \sum_{s'} P(s'\mid s,a)\,\big[\,R(s,a)+\gamma\,V_k(s')\,\big]\]until changes fall below a tolerance; then act greedily with respect to $V$. With grids and tic-tac-toe, this converges quickly and matches intuition: the closer to winning, the higher the value.
How to solve it in practice: if the model $P$ is known, you can iterate to convergence. For policy evaluation, initialize $V_0$ arbitrarily and update
\[V_{k+1}(s)=\sum_{a}\pi(a\mid s)\sum_{s'} P(s'\mid s,a)\,\big[\,R(s,a)+\gamma\,V_k(s')\,\big].\]Improve the policy greedily via
\[\pi_{k+1}(s)=\arg\max_{a}\ \sum_{s'} P(s'\mid s,a)\,\big[\,R(s,a)+\gamma\,V_k(s')\,\big],\]and alternate these two steps (policy iteration). Or collapse them into value iteration:
\[V_{k+1}(s)=\max_{a}\ \sum_{s'} P(s'\mid s,a)\,\big[\,R(s,a)+\gamma\,V_k(s')\,\big]\]until changes fall below a tolerance; then act greedily with respect to $V$. With grids and tic-tac-toe, this converges quickly and matches intuition: the closer to winning, the higher the value.
Layer 3 Q-Learning: learning optimal action values from experience
When the dynamics $P$ are unknown, Watkins’ Q-Learning learns $Q^*(s,a)$ directly from trajectories. The canonical update is
\[Q(s,a) \leftarrow Q(s,a) + \alpha\Big[\, r + \gamma \max_{a'} Q(s',a') - Q(s,a) \,\Big],\]with learning rate $\alpha \in (0,1]$. The agent typically uses $\epsilon$-greedy exploration: with probability $1-\epsilon$ it selects $\arg\max_a Q(s,a)$, and with probability $\epsilon$ it explores a random action. Over repeated visits, actions that ultimately lead to high returns accumulate larger $Q$-values; poor actions decay.
How to solve it step by step: initialize $Q(s,a)$ (often to zero). For each episode, start in some $s$; at each step pick an action via $\epsilon$-greedy, observe reward $r$ and next state $s’$, apply the update above, then move to $s’$. Anneal $\epsilon$ over time and stop when $Q$ stabilizes or your target performance is reached.
With function approximation (e.g., a neural network $\hat Q_\theta$), minimize the squared TD error
\[\mathcal{L}_{\text{DQN}} = \Big( r + \gamma \max_{a'} \hat Q_{\theta^-}(s',a') - \hat Q_\theta(s,a) \Big)^2,\]using gradient descent; DQN stabilizes training with experience replay and a target network (parameters $\theta^-$) updated periodically.
by gradient descent; DeepMind’s DQN adds experience replay and target networks for stability (Mnih et al., 2015).
Layer 4 — Policy gradients: optimizing behavior directly
Policy gradient methods skip value maximization and adjust a parameterized policy πθ(a∣s)πθ(a∣s) to maximize expected return. Write the objective as
\[J(\theta)=\mathbb{E}_{\tau\sim\pi_\theta}\!\left[\sum_{t\ge 0}\gamma^t r_{t+1}\right]\]Using the likelihood-ratio trick (REINFORCE), the gradient becomes
\[\nabla_\theta J(\theta) = \mathbb{E}_{\tau\sim\pi_\theta}\!\left[\sum_{t} \nabla_\theta \log \pi_\theta(a_t \mid s_t)\, G_t\right]\]where GtGt is a return estimate from time tt. Intuitively, actions that led to high returns are made more likely, proportional to how sensitive the policy was to choosing them (Williams, 1992).
How to solve it step by step: sample trajectories by running $\pi_\theta$ in the environment; compute returns $G_t$ for each step (Monte-Carlo or bootstrapped estimates); form the stochastic gradient and apply the parameter update.
\[\widehat{\nabla_\theta J(\theta)}=\sum_{t}\nabla_\theta \log \pi_\theta(a_t \mid s_t)\, G_t\] \[\theta \leftarrow \theta + \eta\, \widehat{\nabla_\theta J(\theta)}\]This naïve estimator is high-variance, so two refinements are essential in practice.
First, subtract a baseline $b(s_t)$ without biasing the gradient:
\[\nabla_\theta J(\theta) = \mathbb{E}\!\left[\sum_t \nabla_\theta \log \pi_\theta(a_t \mid s_t)\,\big(G_t - b(s_t)\big)\right].\]Choosing $b(s)=V^\pi(s)$ yields the advantage $A^\pi(s,a)=Q^\pi(s,a)-V^\pi(s)$, focusing the update on how much better an action was than typical for that state (A2C/A3C; Mnih et al., 2016).
\[A^\pi(s,a)=Q^\pi(s,a)-V^\pi(s).\]A practical estimator uses the TD-error
\[\delta_t = r_{t+1} + \gamma\, V_\phi(s_{t+1}) - V_\phi(s_t),\]and its exponentially-weighted sums. Schulman et al. (2016) popularized Generalized Advantage Estimation (GAE):
\[\hat A_t=\sum_{\ell=0}^{\infty}(\gamma\lambda)^{\ell}\,\delta_{t+\ell},\qquad \lambda\in[0,1].\]Second, encourage exploration by adding entropy regularization. Augment the objective with
\[J_{\text{ent}}(\theta)=\beta\,\mathbb{E}_s\!\left[\,H\!\big(\pi_\theta(\cdot\mid s)\big)\right],\]where $H(\cdot)$ is the categorical entropy and $\beta>0$ controls strength. The resulting actor loss adds the entropy term, resisting premature collapse to deterministic policies and often improving robustness.
How to solve it end-to-end (actor–critic loop)
Initialize policy parameters $\theta$ and value-function parameters $\phi$. Roll out the policy to collect batches of $(s_t,a_t,r_{t+1},s_{t+1})$. Compute value targets $\hat V_{\text{target},t}$ and advantages $\hat A_t$ (via TD-errors or GAE). Update the critic and actor as follows, then repeat until returns plateau.
\[\mathcal{L}_{\text{critic}}=\sum_t\Big(\hat V_{\text{target},t}-V_\phi(s_t)\Big)^2\] \[\mathcal{L}_{\text{actor}}=-\sum_t \log \pi_\theta(a_t\mid s_t)\,\hat A_t\;-\;\beta\, H\!\big(\pi_\theta(\cdot\mid s_t)\big)\] \[\theta \leftarrow \theta - \eta\,\nabla_\theta \mathcal{L}_{\text{actor}},\qquad \phi \leftarrow \phi - \eta_V\, \nabla_\phi \mathcal{L}_{\text{critic}}.\]PPO keeps the same advantage-based objective but constrains each policy update to stay near the old policy by clipping the probability ratio, which stabilizes training (Schulman et al., 2017).
A final intuition check
If the maze exit lights up with a reward, Bellman equations let value “shine backward” through adjacent cells until the whole map encodes how promising each square is. Q-Learning learns this map by touching the walls and remembering what hurt or helped. Policy gradients skip the map and instead tune the agent’s instincts directly, rewarding it for sequences that ended well, dampening instincts that didn’t, and keeping a dash of randomness so it doesn’t stop searching too soon.
The Code
This section gives you a compact, runnable path from a tabular baseline to a neural one. We start with Q-Learning on FrozenLake to make the update rule concrete, then scale the same idea to function approximation with a tiny PyTorch DQN on CartPole.
Read the short motivation, skim the pseudocode to lock in the algorithmic loop, and run the Python to verify you can reproduce learning on your machine.
Q-Learning learns action values in a table by bootstrapping from its own estimates. At each step you act ε-greedily from the current state, observe the next state and reward, and push the old entry toward the target r+γmaxa′Q(s′,a′)r+γmaxa′Q(s′,a′). Exploration starts high and decays so the agent first discovers outcomes and then exploits what it has learned. On FrozenLake, using a deterministic variant keeps the learning curve focused on the update itself rather than stochastic slips.
Q-Learning (pseudocode)
for episode in range(E):
s = env.reset()
done = False
while not done:
a = epsilon_greedy(Q[s])
s2, r, done, _ = env.step(a)
Q[s, a] = Q[s, a] + alpha * (r + gamma * (0 if done else max(Q[s2])) - Q[s, a])
s = s2
Tabular Q-Learning — FrozenLake
import gymnasium as gym
import numpy as np
env = gym.make("FrozenLake-v1", is_slippery=False) # deterministic for clarity
nS, nA = env.observation_space.n, env.action_space.n
Q = np.zeros((nS, nA))
alpha, gamma = 0.8, 0.95
epsilon, eps_min, eps_decay = 1.0, 0.05, 0.995
episodes, max_steps = 800, 100
def epsilon_greedy(s):
return env.action_space.sample() if np.random.rand() < epsilon else np.argmax(Q[s])
for _ in range(episodes):
s, _ = env.reset()
for _ in range(max_steps):
a = epsilon_greedy(s)
s2, r, term, trunc, _ = env.step(a)
done = term or trunc
best_next = 0.0 if done else np.max(Q[s2])
Q[s, a] += alpha * (r + gamma * best_next - Q[s, a])
s = s2
if done: break
print("Sample Q[0]:", Q[0])
Deep Q-Networks replace the table with a neural network Qθ(s,⋅)Qθ(s,⋅), train it on random mini-batches from a replay buffer to break temporal correlations, and stabilize targets with a lagged copy Qθ−Qθ−. A small MLP is enough for CartPole.
Using the Double DQN trick selecting the next action with the policy network but evaluating it with the target network reduces overestimation bias and improves stability without extra complexity. Keep ε-greedy exploration early, start learning only after the buffer has a few hundred to a thousand transitions, and periodically sync the target network.
DQN (pseudocode)
initialize policy network Qθ and target network Qθ− (copy of θ)
initialize replay buffer B
for each episode:
s = env.reset()
done = False
while not done:
with prob ε: a = random action
else: a = argmax_a Qθ(s,a)
s2, r, done = env.step(a); store (s,a,r,s2,done) in B
if len(B) ≥ batch_size:
sample (S,A,R,S2,D) ~ B
y = R + γ * (1 − D) * Qθ−(S2, argmax_a Qθ(S2,a)) # Double DQN target
loss = Huber(Qθ(S,A), y); backprop on θ
every K steps: θ− ← θ
s ← s2
DQN — CartPole (PyTorch) with Replay Buffer + Target Network
import gymnasium as gym, numpy as np, torch, random, collections
import torch.nn as nn, torch.optim as optim
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
env = gym.make("CartPole-v1")
class ReplayBuffer:
def __init__(self, cap=50_000): self.buf = collections.deque(maxlen=cap)
def push(self, s,a,r,s2,d): self.buf.append((s,a,r,s2,d))
def sample(self, bs=64):
batch = random.sample(self.buf, bs)
s,a,r,s2,d = map(np.array, zip(*batch))
to = lambda x,dt: torch.tensor(x, dtype=dt, device=device)
return (to(s,torch.float32), to(a,torch.int64).unsqueeze(1),
to(r,torch.float32).unsqueeze(1), to(s2,torch.float32),
to(d,torch.float32).unsqueeze(1))
def __len__(self): return len(self.buf)
class QNet(nn.Module):
def __init__(self, obs_dim, n_act):
super().__init__()
self.net = nn.Sequential(
nn.Linear(obs_dim,128), nn.ReLU(),
nn.Linear(128,128), nn.ReLU(),
nn.Linear(128,n_act)
)
def forward(self,x): return self.net(x)
obs_dim, n_act = env.observation_space.shape[0], env.action_space.n
policy, target = QNet(obs_dim,n_act).to(device), QNet(obs_dim,n_act).to(device)
target.load_state_dict(policy.state_dict()); target.eval()
opt = optim.Adam(policy.parameters(), lr=1e-3)
gamma = 0.99
buf = ReplayBuffer()
batch_size, start_learn, sync_every = 64, 1000, 1000
eps, eps_min, eps_decay = 1.0, 0.05, 0.995
global_step = 0
def act(s, eps):
if random.random() < eps: return env.action_space.sample()
with torch.no_grad():
q = policy(torch.tensor(s, dtype=torch.float32, device=device).unsqueeze(0))
return int(q.argmax(1))
for ep in range(300):
s, _ = env.reset(seed=random.randint(0, 10_000))
done = False
while not done:
a = act(s, eps)
s2, r, term, trunc, _ = env.step(a)
done = term or trunc
buf.push(s,a,r,s2,done)
s = s2
global_step += 1
if len(buf) >= start_learn:
S,A,R,S2,D = buf.sample(batch_size)
with torch.no_grad():
next_a = policy(S2).argmax(1, keepdim=True)
target_q = R + gamma * (1 - D) * target(S2).gather(1, next_a)
q = policy(S).gather(1, A)
loss = nn.functional.smooth_l1_loss(q, target_q)
opt.zero_grad(); loss.backward()
nn.utils.clip_grad_norm_(policy.parameters(), 10.0)
opt.step()
if global_step % sync_every == 0:
target.load_state_dict(policy.state_dict())
eps = max(eps_min, eps * eps_decay)
print("Training complete.")
If you prefer studying from existing, public code, the classic reference implementations and a Colab-backed tutorial are freely available.
Denny Britz’s Reinforcement Learning GitHub repository includes tabular algorithms like Q-Learning in clean NumPy form at github.com/dennybritz/reinforcement-learning, and the official PyTorch tutorial “Reinforcement Q-Learning” provides a step-by-step DQN notebook at pytorch.org/tutorials/…/reinforcement_q_learning that you can open directly in Colab.
RL Playgrounds

Reinforcement Learning playgrounds are sandboxes for rapid, reproducible experimentation where you prototype algorithms, visualize behavior, tune rewards, and debug safely. OpenAI Gym/Gymnasium offers standardized single-agent benchmarks with a consistent API, from CartPole (balance), to LunarLander (control), to MountainCar (sparse rewards), letting you swap environments with minimal code changes. For multi-agent settings, PettingZoo extends the idea to competitive and cooperative tasks with clear interfaces for parallel or turn-based interactions. Together, these suites enable apples-to-apples comparisons, curriculum design from simple to complex, and fast iteration cycles that turn ideas into working policies.
We’ll create a tiny playground runner that executes short rollouts in three classic Gymnasium tasks CartPole, MountainCar, and (optionally) LunarLander then saves a compact results.json file summarizing average and best returns. Next, we’ll use a clean, interactive HTML dashboard to visualize those results with a table, metric chips, and per-environment sparklines. This lets you prototype quickly, compare policies, and sanity-check learning without wiring a full training loop. CartPole should show fast improvement even with simple policies (dense rewards). MountainCar highlights sparse-reward momentum building (a tiny heuristic beats random). LunarLander adds noise/variance and requires Box2D; enable it to stress-test stability.
Python run rollouts
Save this as run_playgrounds.py and run it with python run_playgrounds.py –episodes 10. It uses random actions by default, with a small velocity-sign heuristic for MountainCar when –policy auto (default). LunarLander is commented out to keep dependencies light; see the note below to enable it.
# run_playgrounds.py
# Minimal Gymnasium playground runner for CartPole, MountainCar (+ optional LunarLander).
# Usage:
# pip install gymnasium
# # optional for LunarLander: pip install "gymnasium[box2d]" box2d-py
# python run_playgrounds.py --episodes 10
import json, random, argparse
from dataclasses import dataclass, asdict
from typing import List
import numpy as np
import gymnasium as gym
@dataclass
class EpisodeResult:
episode: int
return_: float
length: int
@dataclass
class EnvSummary:
env_id: str
policy: str
episodes: int
avg_return: float
best_return: float
returns: List[EpisodeResult]
def run_env(env_id: str, episodes: int = 5, max_steps: int = 1000, policy: str = "auto") -> EnvSummary:
env = gym.make(env_id)
results: List[EpisodeResult] = []
def act_random(_obs): return env.action_space.sample()
# MountainCar heuristic: push toward velocity sign to build momentum
def act_mountaincar(obs):
position, velocity = obs
return 2 if velocity > 0 else 0 # 0=left, 2=right
if policy == "auto" and "MountainCar" in env_id:
choose_action, used_policy = act_mountaincar, "heuristic(velocity-sign)"
else:
choose_action, used_policy = act_random, "random"
for ep in range(1, episodes+1):
obs, _ = env.reset(seed=random.randint(0, 10_000))
total_r = 0.0
for t in range(max_steps):
a = choose_action(obs)
obs, r, terminated, truncated, _ = env.step(a)
total_r += float(r)
if terminated or truncated:
results.append(EpisodeResult(ep, total_r, t+1))
break
else:
results.append(EpisodeResult(ep, total_r, max_steps))
env.close()
avg_r = float(np.mean([r.return_ for r in results]))
best_r = float(np.max([r.return_ for r in results]))
return EnvSummary(env_id, used_policy, episodes, avg_r, best_r, results)
def main():
ap = argparse.ArgumentParser()
ap.add_argument("--episodes", type=int, default=5, help="episodes per environment")
ap.add_argument("--max-steps", type=int, default=1000, help="max steps per episode")
ap.add_argument("--policy", type=str, default="auto", choices=["random","auto"], help="action policy")
ap.add_argument("--out", type=str, default="results.json", help="output JSON path")
args = ap.parse_args()
# Add "LunarLander-v2" here IF Box2D is installed:
# pip install "gymnasium[box2d]" box2d-py
envs = ["CartPole-v1", "MountainCar-v0"] # + ["LunarLander-v2"]
payload = {"generated_at": "", "episodes_per_env": args.episodes, "policy": args.policy, "envs":[]}
for env_id in envs:
s = run_env(env_id, episodes=args.episodes, max_steps=args.max_steps, policy=args.policy)
payload["envs"].append({
**{k:v for k,v in asdict(s).items() if k != "returns"},
"returns": [asdict(r) for r in s.returns]
})
from time import strftime, localtime
payload["generated_at"] = strftime("%Y-%m-%d %H:%M:%S", localtime())
with open(args.out,"w") as f: json.dump(payload, f, indent=2)
print(f"Wrote {args.out}")
if __name__ == "__main__":
main()
Interpreting results: CartPole’s average return should trend upward even with simple exploration because rewards are dense; ~200 indicates a full solve for an episode. MountainCar’s averages are typically negative (−1 per step) until you reach the flag; the heuristic demonstrates momentum building and usually beats random without learning. If you enable LunarLander, expect wider variance and noisier returns use it to test stability knobs (target-sync cadence, grad clipping, replay size) when you later add DQN or PPO.
PettingZoo standardizes multi-agent RL environments so you can prototype, train, and compare MARL algorithms with one consistent API across many tasks.
# PettingZoo MARL demo: rollouts + simple random policies and logging
# pip install pettingzoo==1.* gymnasium==0.29.* numpy==1.* (if needed)
import numpy as np
from pettingzoo.mpe import simple_v3
from collections import defaultdict
def rollout(env, episodes=25, seed=42):
rng = np.random.default_rng(seed)
per_agent_returns = defaultdict(list)
episode_lengths = []
for ep in range(episodes):
env.reset(seed=seed+ep)
done = {a: False for a in env.agents}
trunc = {a: False for a in env.agents}
total_steps = 0
# Iterate through agents in the AEC API
for agent in env.agent_iter():
obs, rew, terminated, truncated, info = env.last()
if terminated or truncated:
action = None # no-op when done
else:
action = env.action_space(agent).sample() # random policy
env.step(action)
per_agent_returns[agent].append(rew)
total_steps += 1
done[agent] = terminated
trunc[agent] = truncated
episode_lengths.append(total_steps)
# Aggregate
results = []
for agent, rewards in per_agent_returns.items():
# rewards are logged at each agent turn; sum per-episode by counting turns per episode
# For quick demo, take mean reward per agent-step and total sum across all steps
results.append({
"agent": agent,
"steps_logged": len(rewards),
"avg_reward_per_step": float(np.mean(rewards)),
"sum_reward": float(np.sum(rewards)),
})
summary = {
"episodes": episodes,
"avg_episode_length_agent_steps": float(np.mean(episode_lengths)),
"agents": sorted([r["agent"] for r in results]),
"per_agent": sorted(results, key=lambda r: r["agent"]),
}
return summary
if __name__ == "__main__":
# Minimal cooperative task (continuous space under the hood, discrete wrapper by default)
env = simple_v3.env(N=3, max_cycles=50, continuous_actions=False)
env.reset(seed=42)
results = rollout(env, episodes=30, seed=7)
print(results) # replace with saving to JSON if you like
Explanation (what’s happening)
PettingZoo uses an Agent-Environment-Cycle (AEC) API: agents act in turns within each timestep. In the script, we roll out the cooperative MPE environment simple_v3 for 30 episodes using random actions to baseline performance. We log each agent’s reward at its turn, then aggregate per-agent averages and totals. Negative mean rewards are expected here because agents don’t coordinate to reach landmarks; replacing the random policy with a learned multi-agent method (e.g., Independent Q-Learning or MADDPG) should increase average returns and shorten episodes as coordination improves.
Popular Architectures & Algorithms
DQN – good for discrete actions
Deep Q-Networks (DQN) extend classic Q-learning to high-dimensional observations by replacing the tabular $Q(s,a)$ with a deep network $Q_{\theta}(s,a)$. At its core, DQN seeks parameters $\theta$ that minimize the temporal-difference (TD) regression to the Bellman optimality target. For a transition $(s,a,r,s’)$, the target is $y=r+\gamma\,\max_{a’}Q_{\theta^-}(s’,a’)$, where $\theta^-$ are the “target network” parameters held fixed for several updates to stabilize training. The loss on a mini-batch $\mathcal{B}$ is \(\mathcal{L}(\theta)=\frac{1}{\mid\mathcal{B}\mid} \sum_{(s,a,r,s')\in\mathcal{B}}\Big( y - Q_{\theta}(s,a) \Big)^2, \quad y=r+\gamma\,\max_{a'}Q_{\theta^-}(s',a').\) Two key engineering ideas make DQN work in practice on discrete-action problems like Atari: an experience replay buffer $\mathcal{D}$ that breaks temporal correlations by sampling uniformly from stored transitions, and a separate target network $Q_{\theta^-}$ that slows the drift of targets. Agents explore with $\varepsilon$-greedy behavior, decaying $\varepsilon$ from near $1$ to a small floor so that $\Pr(a=\arg\max_a Q_{\theta}(s,a))$ increases over time. Stabilizers such as reward clipping (e.g., $r\leftarrow\mathrm{clip}(r,-1,1)$), observation preprocessing (grayscale, resize, frame-stacking), gradient clipping, and periodic target updates every $C$ steps keep the learning signal well-behaved. While vanilla DQN can overestimate values due to the $\max$ operator, the Double DQN variant replaces the target with $y=r+\gamma\,Q_{\theta^-}\big(s’,\arg\max_{a’} Q_{\theta}(s’,a’)\big)$ to reduce positive bias; prioritized replay further improves sample efficiency by sampling transitions with large TD errors more often. DQN shines when actions are discrete and moderate in number (e.g., up/down/left/right/jump), offering a clean path from pixels-to-actions; for continuous actions, policy-gradient or actor–critic methods are usually preferred.
// Pseudocode: Deep Q-Network (DQN) for discrete actions
Initialize Q-network parameters θ randomly
Initialize target network parameters θ⁻ ← θ
Initialize replay buffer 𝓓 with capacity N
for episode = 1 ... M:
s ← env.reset()
for t = 1 ... T:
With probability ε select a random action a
otherwise a ← argmax_a Q_θ(s, a)
s', r, done ← env.step(a)
Store (s, a, r, s', done) in 𝓓
s ← s'
// Learn every K environment steps (optional)
if time_to_learn():
Sample a minibatch B = {(s_i,a_i,r_i,s'_i,done_i)} from 𝓓
For each i in B:
if done_i:
y_i ← r_i
else:
// Vanilla DQN target:
y_i ← r_i + γ * max_{a'} Q_{θ⁻}(s'_i, a')
// Double DQN target (drop-in replacement):
// a* ← argmax_{a'} Q_θ(s'_i, a')
// y_i ← r_i + γ * Q_{θ⁻}(s'_i, a*)
Compute loss: L ← (1/\midB\mid) * Σ_i (y_i - Q_θ(s_i, a_i))²
Update θ by one or more gradient steps to minimize L
Optionally clip gradients and/or rewards
Every C steps: θ⁻ ← θ // target network update
Decay ε toward ε_min
if done: break
Why it works in practice. Replay makes the SGD gradient approximate the expectation in the Bellman error by mixing old and new transitions, the fixed $\theta^-$ prevents “chasing a moving target,” and the $\varepsilon$ schedule gradually shifts the policy from exploration to exploitation as $Q_{\theta}$ improves. In Atari, a typical setup stacks 4 frames to inject short-term velocity, uses Adam with a modest learning rate, trains on mini-batches uniformly sampled from $\mathcal{D}$, and syncs $\theta^-\leftarrow\theta$ every few thousand updates. Limitations include value overestimation (mitigated by Double DQN), poor sample efficiency without prioritized replay, and sensitivity to preprocessing; nevertheless, for discrete action spaces with rich observations, DQN remains a robust and accessible baseline.
References. [1] Mnih, V. et al. “Human-level control through deep reinforcement learning,” Nature, 518, 2015. doi:10.1038/nature14236. [2] Van Hasselt, H., Guez, A., Silver, D. “Deep Reinforcement Learning with Double Q-learning,” AAAI, 2016. arXiv:1509.06461. [3] Schaul, T., Quan, J., Antonoglou, I., Silver, D. “Prioritized Experience Replay,” ICLR, 2016. arXiv:1511.05952.
Double DQN – solves overestimation bias
Double DQN fixes a systematic overestimation in vanilla DQN that comes from using the same value function both to select and to evaluate the bootstrapped action at the next state. In standard DQN, the target is $y=r+\gamma\max_{a’}Q_{\theta^-}(s’,a’)$; the noisy max operator tends to overestimate the true value because $\mathbb{E}[\max_i X_i]\ge\max_i\mathbb{E}[X_i]$ when the estimates $X_i$ contain noise. Double DQN decouples selection and evaluation by using the online network $Q_{\theta}$ to pick the greedy action and the target network $Q_{\theta^-}$ to score it: \(y\_{\text{Double}}\;=\;r\; +\; \gamma\; Q\_{\theta^-}\!\big(s',\;\arg\max\_{a'} Q\_{\theta}(s',a')\big).\) This small change reduces positive bias without increasing computational cost, while keeping all the stabilizers of DQN (replay buffer, target network, $\varepsilon$-greedy exploration). Intuitively, the online network handles which action looks best (argmax), and the target network—frozen for $C$ steps—provides a less biased how good estimate for that chosen action. In practice Double DQN improves value accuracy and learning stability on discrete-action benchmarks like Atari, especially for games where spurious high Q-values can derail exploration. You can combine Double DQN with other upgrades (e.g., prioritized replay or dueling heads) since it only modifies the TD target. The loss remains a simple mean-squared TD error over mini-batches $\mathcal{B}$: \(\mathcal{L}(\theta)=\frac{1}{\mid\mathcal{B}\mid}\sum\_{(s,a,r,s')}\big(y\_{\text{Double}}-Q\_{\theta}(s,a)\big)^2, \qquad y\_{\text{Double}}=r+\gamma\,Q\_{\theta^-}\big(s',\arg\max\_{a'}Q\_{\theta}(s',a')\big).\)
// Pseudocode: Double DQN (discrete actions)
Initialize online network parameters θ
Initialize target network parameters θ⁻ ← θ
Initialize replay buffer 𝓓 with capacity N
for episode = 1 ... M:
s ← env.reset()
for t = 1 ... T:
With probability ε choose random action a
otherwise a ← argmax_a Q_θ(s, a)
s', r, done ← env.step(a)
Store (s, a, r, s', done) in 𝓓
s ← s'
if time_to_learn():
Sample minibatch B = {(s_i,a_i,r_i,s'_i,done_i)} from 𝓓
// Action selection uses online net (θ)
a*_i ← argmax_{a'} Q_θ(s'_i, a')
// Action evaluation uses target net (θ⁻)
q_eval_i ← Q_{θ⁻}(s'_i, a*_i)
// Double DQN target
y_i ← r_i if done_i else r_i + γ * q_eval_i
// Optimize θ via one or more gradient steps
L ← (1/\midB\mid) * Σ_i (y_i - Q_θ(s_i, a_i))²
Update θ to minimize L (e.g., Adam); optionally clip grads
Every C steps: θ⁻ ← θ // refresh target network
Decay ε toward ε_min
if done: break
Notes. The only change from DQN is the target: use $\arg\max_{a’} Q_{\theta}(s’,a’)$ for selection and $Q_{\theta^-}(s’,\cdot)$ for evaluation. Everything else—preprocessing, replay sampling, frame stacking, reward clipping, target sync period—stays the same. This separation curbs optimistic bias from the noisy max, yielding more reliable value learning without sacrificing simplicity.
References. [1] Van Hasselt, H. “Double Q-learning,” NIPS, 2010. NeurIPS 2010. [2] Van Hasselt, H., Guez, A., Silver, D. “Deep Reinforcement Learning with Double Q-learning,” AAAI, 2016. arXiv:1509.06461. [3] Mnih, V. et al. “Human-level control through deep reinforcement learning,” Nature, 518, 2015. doi:10.1038/nature14236.
A3C / A2C – parallel actor-learners
Asynchronous Advantage Actor–Critic (A3C) accelerates and stabilizes training by running many lightweight actor-learners in parallel environments, each with its own copy of parameters θ (policy) and θᵥ (value). Each worker collects short on-policy rollouts, computes multi-step returns and advantages At = ∑k=0n−1 γk r{t+k} + γn Vθᵥ(s{t+n}) − Vθᵥ(st), and then pushes asynchronous gradients to shared parameters (often via a Hogwild-style update) so exploration decorrelates naturally across threads. The policy is optimized by maximizing the entropy-regularized objective J(θ) = E[∑t log πθ(at | st) · Ât + β · H(πθ(· | st))], while the critic minimizes ∑t(Rt − Vθᵥ(st))2. Advantage Actor–Critic (A2C) is the synchronous variant: it runs the same parallel rollout collection but averages gradients across workers and applies a single update step per cycle. In practice, A3C/A2C are strong choices for discrete or continuous actions, scale well on CPUs, and learn robust behaviors without replay buffers. Key knobs are the rollout length n, entropy weight β, learning rate, and the balance of workers and envs per worker.
// Pseudocode: A3C / A2C (parallel actor–critics)
Shared parameters: θ (policy), θᵥ (value)
Spawn W workers (threads or processes)
For each worker w in parallel:
loop over cycles:
Sync local copy: θ_w ← θ ; θᵥ_w ← θᵥ
Roll out for n steps in env:
s_t → a_t ~ π_{θ_w}(·\mid s_t) → r_t, s_{t+1}
Compute bootstrap V̂ = 0 if terminal else V_{θᵥ_w}(s_{t+n})
For t = n−1 … 0:
R_t ← r_t + γ * R_{t+1} with R_{n} = V̂
A_t ← R_t − V_{θᵥ_w}(s_t)
Policy loss: L_π = − mean_t [ log π_{θ_w}(a_t\mid s_t) * A_t + β H(π_{θ_w}(·\mid s_t)) ]
Value loss: L_V = mean_t [ (R_t − V_{θᵥ_w}(s_t))² ]
Total loss: L = L_π + c_v * L_V
Compute gradients ∇θ_w, ∇θᵥ_w of L
// A3C: asynchronous Hogwild-style apply
Apply gradients to shared θ, θᵥ immediately
// A2C (synchronous): instead buffer ∇ from all workers,
// then average and apply once per cycle
// Tune n (rollout length), β (entropy), c_v (value weight)
| Why parallelism helps. Multiple actors diversify trajectories and decorrelate updates without a replay buffer. Short n-step returns reduce bias/variance trade-offs, entropy β·H(π) sustains exploration, and CPU-friendly threads scale easily. A2C’s synchronized averaging often improves stability on GPUs; A3C’s async updates can be faster on many-core CPUs. Typical heads share a convolutional (or MLP) torso with two output branches: πθ(a | s) an |
PPO – stable, scalable
Proximal Policy Optimization (PPO) strikes a practical balance between stability and sample efficiency by applying multiple SGD epochs on recent on-policy data while constraining each update to stay “proximal” to the behavior policy. Let $r_t(\theta)=\frac{\pi_{\theta}(a_t\mid s_t)}{\pi_{\theta_{\text{old}}}(a_t\mid s_t)}$ be the probability ratio and $\hat A_t$ an advantage estimate (often GAE). The clipped surrogate maximizes the lower bound \(L^{\text{CLIP}}(\theta) = \mathbb{E}_t\Big[\min\big(r_t(\theta)\,\hat A_t,\; \mathrm{clip}(r_t(\theta),\,1-\epsilon,\,1+\epsilon)\,\hat A_t\big)\Big],\) penalizing steps that would push $r_t$ outside $[1-\epsilon,1+\epsilon]$. A typical total loss couples this objective with a value-function regression and an entropy bonus, \(\mathcal{L}(\theta)= -L^{\text{CLIP}}(\theta) \, + \, c_v\,\mathbb{E}_t\big(V_{\theta}(s_t)-\hat V_t\big)^2 \, - \, c_e\,\mathbb{E}_t\,\mathcal{H}\big(\pi_{\theta}(\cdot\mid s_t)\big),\) yielding robust improvements with simple hyperparameters (clip $\epsilon\approx0.1$–$0.3$, 3–10 epochs, minibatches over the rollout buffer). PPO scales cleanly on CPUs/GPUs, works for discrete and continuous actions, and has powered many large-scale applications because its update rule remains stable even under aggressive optimization.
// Pseudocode: PPO-Clip with GAE (discrete or continuous actions)
Initialize policy/value network parameters θ (shared torso; policy & value heads)
Repeat for iterations k = 1…K:
// Rollout
Collect trajectories for T steps with current policy π_θ:
store (s_t, a_t, r_t, logp_old_t, v_t, done_t)
Compute value bootstrap v_{T} for last state
// Generalized Advantage Estimation (GAE)
δ_t = r_t + γ * v_{t+1} * (1 - done_t) - v_t
Â_t = discounted_sum(δ_t, λγ)
V̂_t = Â_t + v_t
Normalize advantages Â_t (zero mean, unit std)
// Policy/Value optimization
For epoch = 1…E:
For each minibatch B from the rollout buffer:
r_t(θ) = exp( logπ_θ(a_t \mid s_t) - logp_old_t )
L_clip = mean( min( r_t * Â_t,
clip(r_t, 1-ε, 1+ε) * Â_t ) )
L_value = mean( (V_θ(s_t) - V̂_t)^2 )
L_entropy= mean( entropy(π_θ(·|s_t)) )
Loss = -L_clip + c_v * L_value - c_e * L_entropy
Update θ by one optimizer step on Loss (e.g., Adam)
Optionally: early-stop epochs if KL(π_old || π_θ) exceeds target
Optionally: clip value updates or use separate value lr
// Typical: ε∈[0.1,0.3], λ≈0.95, γ≈0.99, E∈[3,10], minibatch size 2–8k
Why it works. The clipped surrogate behaves like a soft trust-region: it preserves monotonic-like improvements without expensive second-order computation. Multiple epochs over the same on-policy batch squeeze more learning signal per sample while the clip (and optional KL early-stop) keeps updates conservative. With GAE to reduce variance, PPO delivers strong performance across robotics control, games, and large-scale simulated tasks with minimal tuning.
References. [1] Schulman, J. et al. “Proximal Policy Optimization Algorithms,” 2017. arXiv:1707.06347. [2] Schulman, J. et al. “High-Dimensional Continuous Control Using Generalized Advantage Estimation,” 2016. arXiv:1506.02438. [3] OpenAI Spinning Up, “PPO.” overview and tips.
When to Use What
Use DQN for pixel-based, discrete actions; switch to Double DQN to curb overestimation. Choose A3C/A2C for CPU-friendly parallel on-policy training. Pick PPO for stable, scalable, low-tuning policies. Select SAC for continuous control: off-policy, sample-efficient, entropy-regularized with auto temperature. Add prioritized replay or dueling to DQN-family when needed.
RL Projects & Applications — Training an Atari Agent (DQN, PyTorch)
Overview. In this project we implemented a classic Deep Q-Learning (DQN) agent in PyTorch and trained it on Atari environments exposed through the Gym interface. The goal is to learn a policy that maximizes long-term score directly from pixels. We follow the canonical DQN recipe—frame preprocessing and stacking, ε-greedy exploration, an experience replay buffer, a periodically updated target network, and Huber loss. The result is a compact, reproducible pipeline that learns meaningful strategies on games like Breakout and Pong.
From Pixels to Actions: Data Pipeline
Each raw 210×160 RGB frame is converted to grayscale, resized (e.g., 84×84), and normalized. To give the agent a sense of velocity, we stack the most recent $k$ frames (commonly $k=4$) into a single observation tensor $\in \mathbb{R}^{k \times 84 \times 84}$. Atari wrappers apply frame-skipping and max-pooling to reduce flicker and speed up training; reward clipping maps dense rewards into ${-1,0,1}$, which stabilizes gradients across different games with very different score scales.
Q-Learning with a Deep Network
The agent approximates the optimal action-value function $Q^*(s,a)$ with a convolutional network $Q_\theta(s,a)$. For each sampled transition $(s,a,r,s’,\text{done})$ from the replay buffer, we form the target with a lagged copy of the network $Q_{\theta^-}$:
\[y = \begin{cases} r & \text{if done} \ r + \gamma \max_{a'} Q_{\theta^-}(s',a') & \text{otherwise.} \end{cases}\]We minimize a robust Huber loss \(\mathcal{L}(\theta)=\mathbb{E}\big[\mathrm{Huber}\big(y - Q_\theta(s,a)\big)\big],\) and update parameters with Adam/RMSProp. Every $C$ gradient steps we copy weights from the online network to the target network, $ \theta^- \leftarrow \theta $, to avoid chasing a moving target.
Exploration & Replay
Actions are selected by an ε-greedy policy. We linearly decay $\varepsilon$ from a high initial value to a small floor to transition from exploration to exploitation: \(\varepsilon(t) = \max\!\big(\varepsilon_{\min},\, \varepsilon_{\max} - \alpha t\big).\) Experience replay stores the last $N$ transitions; each update draws a mini-batch uniformly to break temporal correlations and make the stochastic gradient a better estimator of the Bellman error expectation.
Network Architecture
The model mirrors the original DQN CNN: several convolutional layers extract spatio-temporal features from stacked frames, followed by fully connected layers that produce one Q-value per discrete action (e.g., NOOP, LEFT, RIGHT, FIRE). During evaluation we act greedily $a_t=\arg\max_a Q_\theta(s_t,a)$; during training we sample ε-greedy to keep discovering better trajectories.
Training Loop (Conceptual)
# Pseudocode (PyTorch-style) — white background, black text
for episode in range(num_episodes):
s = env.reset() # stacked frames
for t in range(max_steps):
a = epsilon_greedy(Q_online, s, eps)
s2, r, done, info = env.step(a)
replay.add(s, a, r, s2, done)
s = s2
if replay.size > warmup and step % train_every == 0:
batch = replay.sample(batch_size)
y = r + gamma * (1 - done) * Q_target(s2).max(dim=1).values
loss = huber(Q_online(s).gather(1, a) - y)
optimizer.zero_grad(); loss.backward()
clip_grad_norm_(Q_online.parameters(), max_norm)
optimizer.step()
if step % target_update == 0:
Q_target.load_state_dict(Q_online.state_dict())
if done: break
eps = max(eps_min, eps - eps_decay)
Evaluation Protocol
We periodically run evaluation episodes with $\varepsilon=0$ and record average score, win/loss ratio (for games like Pong), and episode length. Because Atari scores can be bursty, we track moving averages and visualize learning curves to ensure improvements are not one-off lucky runs. Seeding the environment and PyTorch gives reproducible baselines for A/B tweaks.
Outcomes & Behaviors Learned
After sufficient replay warm-up and ε-decay, the agent exhibits recognizable and repeatable strategies. On Breakout it aligns the paddle under predicted ball landings, learns to create side tunnels, and exploits back-wall bounces for rapid scoring. On Pong it anticipates ball trajectories earlier in volleys, gaining consistent winning margins. Qualitatively, trajectories become smooth and purposeful; quantitatively, evaluation averages stabilize and surpass random and naive baselines.

Figure: DQN agents in action on Breakout (left) and Pong (right), taken from the project’s README figures.
Key Hyperparameters (What Mattered)
Replay size large enough to cover diverse contexts; batch size balancing stability and throughput; learning rate tuned to avoid value explosion; target update period $C$ that is neither too fast (chasing noise) nor too slow (stale targets); ε schedule that decays slowly enough to keep discovering new strategies; reward clipping and gradient clipping to control outliers. Small shifts in any of these show up clearly in the evaluation curves.
Troubleshooting & Diagnostics
If training plateaus early, verify that stacked frames truly change over time (no frozen observations), that the replay buffer warms up before updates begin, and that the target network is actually copied on schedule. Exploding values usually point to too-high learning rate, missing reward/grad clipping, or an ε that collapsed prematurely. Always sanity-check by rendering a few training episodes to confirm actions are being sampled and the paddle moves responsively.
Limitations & Next Steps
Vanilla DQN can overestimate values due to the max in the target; Double DQN, prioritized replay, and dueling heads are common upgrades. For harder games or partial observability, frame stacks may still be insufficient—recurrent layers or attention can help. Finally, transfer to continuous control requires policy-gradient or actor–critic methods (e.g., PPO, SAC); Atari remains a great sandbox for value-based methods but is not the final word on real-world RL.
Why this project matters. It’s an end-to-end template for discrete-action RL from pixels: define observations and actions, set up ε-greedy data collection, learn off-policy with replay and a target network, and evaluate greedily. Swap the environment and reward and you can reuse the loop for many applied problems—game agents, UI navigation, simple robotics with discrete controllers, and more.
Code & repository: github.com/mohammed840/Reinforcement-Learning-on-Atari-Games.
RL Projects & Applications — Reinforcement-Learning-based Movie Recommendation
Overview. This project reproduces a movie recommender using two reinforcement-learning strategies: (1) a Multi-Armed Bandits (MAB) recommender that learns which items to show by trading off exploration vs exploitation, and (2) an Actor–Critic deep RL recommender that models recommendation as a sequential decision problem where user interactions are the environment’s feedback. The repository includes a MovieLens dataset folder (data/ml-1m) and two notebooks: RL_BanditsCode.ipynb and ActorCritic_DeepRL_RecommenderSystem.ipynb.
Problem setup: recommendations as an RL loop
At time $t$, the system observes a (possibly partial) user state $s_t$ (e.g., user & context features, history summary) and recommends an item $a_t$ (a movie). The user response provides reward $r_t$ (e.g., click, watch, rating), and the session updates to $s_{t+1}$. Over many interactions, we learn a policy $\pi(a\mid s)$ that maximizes expected long-term engagement: \(\max_{\pi}\; \mathbb{E}_\pi \Big[ \sum_{t\ge 0} \gamma^t\, r_t \Big].\)
Part 1 — Multi-Armed Bandits recommender
In the MAB framing, each candidate movie (or strategy for choosing a movie) is an “arm.” With no explicit state dynamics, the agent learns a value estimate $\hat{\mu}_i$ per arm $i$ and chooses arms that look best while still exploring alternatives. Common choices are $\varepsilon$-greedy, UCB, or Thompson Sampling. This baseline is simple and effective for cold-start traffic or short sessions because it requires minimal modeling assumptions and updates online from immediate rewards.
Part 2 — Actor–Critic deep RL recommender
The Actor–Critic notebook frames recommendation as a Markov Decision Process with function approximation. The critic estimates $V_\phi(s)$ or $Q_\phi(s,a)$, while the actor parameterizes a stochastic policy $\pi_\theta(a\mid s)$. A standard advantage-based update looks like: \(\theta \leftarrow \theta + \eta \,\widehat{\mathbb{E}}\Big[\nabla_\theta \log \pi_\theta(a_t\!\mid\! s_t)\; A_t\Big], \quad A_t = r_t + \gamma V_\phi(s_{t+1}) - V_\phi(s_t)\)
\[\phi \leftarrow \phi - \eta_v \,\widehat{\mathbb{E}}\big[ (r_t + \gamma V_\phi(s_{t+1}) - V_\phi(s_t))^2 \big]\]In practice, the state can embed user history (e.g., a learned representation of past views/ratings), the action can be an item ID or a slate selection strategy, and the reward blends implicit signals (click, watch-time) with explicit ratings to reflect quality and satisfaction over the session. The repository’s README explicitly lists both “Multi Armed Bandits” and an “Actor-Critic based recommender framework” as implemented strategies.
Data & features
The repo ships with a MovieLens directory (data/ml-1m), indicating experiments on the 1M-ratings split (users, items, ratings, timestamps). Typical preprocessing includes joining user/movie metadata, indexing IDs, constructing sparse interaction matrices, and creating per-user histories or session windows that feed the RL state encoder. (Presence of the data/ml-1m folder is visible in the repo file tree.)
Training dynamics & evaluation
MAB stage. Online (or simulated-online) learning picks an arm (movie) per impression and immediately observes reward; we track click-through-rate proxies, average reward, and regret curves vs. an oracle. Exploration controls ($\varepsilon$, UCB confidence) determine how fast we converge and how robust we are to non-stationarity. Actor–Critic stage. We simulate user trajectories from MovieLens interactions. Mini-batches of transitions $(s_t,a_t,r_t,s_{t+1})$ update the critic (value regression) and the actor (policy-gradient). We monitor running averages of reward per step, policy entropy (to avoid collapse), and offline top-K ranking metrics like Precision@K/Recall@K or NDCG computed on held-out sessions. Where ratings exist, we can also report RMSE/MAE on predicted affinity but emphasize sequence-level success (e.g., session length, multi-step engagement).
What we learned (outcomes)
- Cold-start & sparse data. Bandits quickly identify high-reward items with minimal history and serve as strong warm-up baselines before deploying heavier RL. They reduce early regret and stabilize early-life users.
- Session-aware optimization. Actor–Critic optimizes for multi-step objectives (not just one-shot ratings), improving the probability of sustained engagement across a session by using bootstrapped value estimates.
- Exploration that pays off. Both approaches incorporate explicit exploration; controlled exploration prevents popularity bias lock-in and helps discover long-tail movies that later drive higher cumulative reward.
- Personalization via state. Encoding user history into the state improves relevance; even simple history embeddings (e.g., recent-k items) noticeably lift top-K ranking metrics compared to stateless choices.
Pseudocode — Bandits then Actor–Critic (white background)
# Stage 1: Multi-Armed Bandit (epsilon-greedy)
init Q = zeros(num_items); N = zeros(num_items); eps = eps0
for t in 1..T:
if rand() < eps: a = random_item()
else: a = argmax_i Q[i]
r = observe_reward(user_t, a) # click/watch/rating
N[a] += 1
Q[a] += (r - Q[a]) / N[a] # incremental mean
eps = max(eps_min, eps - eps_decay)
# Stage 2: Actor–Critic with advantage updates
for epoch in 1..E:
traj = collect_trajectory(policy=pi_theta, env=users_env)
for (s, a, r, s_next) in traj.batches(batch_size):
with torch.no_grad():
A = r + gamma * V_phi(s_next) - V_phi(s) # advantage
loss_actor = -(log_pi_theta(a \mid s) * A).mean()
loss_critic = (A.detach() ** 2).mean()
(loss_actor + beta * loss_critic).backward()
optimizer.step(); optimizer.zero_grad()
Design choices that mattered
- Reward shaping. Combining implicit signals (click/watch-time) and explicit ratings gives a more faithful objective; session bonuses (e.g., diversity/novelty rewards) prevent degenerate loops.
- Candidate generation vs ranking. In practice we sample a small candidate set per user (ANN vectors, metadata filters) and let the policy rank within that slate—keeps the action space tractable.
- State representation. Even simple recency-weighted embeddings outperform one-hot histories; recurrent/attention encoders help when sessions are long.
- Exploration schedules. Start with higher entropy (policy) or higher $\varepsilon$ (bandit), cool slowly; track regret/entropy to avoid premature convergence.
Repo pointers. The README lists both the MAB and Actor–Critic implementations; the root shows data/ml-1m and the two notebooks (RL_BanditsCode.ipynb, ActorCritic_DeepRL_RecommenderSystem.ipynb) for bandits and deep RL respectively.
Code & repository: github.com/mohammed840/MOVIE-RECOMMENDATION-SYSTEM-USING-DEEP-REINFORCEMENT-LEARNING
Conclusion
Reinforcement Learning is the rare field where a single loop observe, act, reward, update scales from FrozenLake to AlphaGo. The intuition is visceral: like a puppy learning “sit,” agents discover what works by doing, not by being told. The math makes that discovery precise: Bellman equations let value “flow backward” through futures; policy gradients turn good trajectories into better instincts; PPO’s clipping and A3C’s advantage estimates stabilize change. And the code grounds it all tiny Q-tables grow into policies, then into robust systems from tabular updates to deep networks with replay and target copies that keep learning stable.
For me, RL is deep because it mirrors how people grow. There’s no answer key, just feedback, curiosity, and iteration. Every project is a lived experiment where design choices have consequences: reward shaping reveals your values; exploration exposes your risk appetite; baselines and entropy teach humility about variance. I love that the field refuses shortcuts progress is earned episode by episode, graph by graph.
Projects are the bridge from theory to conviction. Atari taught representation and stability; CartPole taught bootstrapping; PPO-powered systems taught trust and scale; robotics and sim-to-real taught grit. Each build tightened the loop between ideas and evidence. That is why this series blends all four pillars: intuition to feel the problem, math to reason about it, code to test it, and projects to prove it.
If you remember one thing, remember the loop. Wrap it in good measurements, respect stability, and let agents surprise you. Start simple, instrument everything, and iterate toward clarity. RL isn’t about scripting intelligence; it’s about creating the conditions where intelligence emerges and watching, with quiet awe, as your agent figures it out. In that cadence, craft, measure, refine, and let learning write itself over time. Episode by episode.
References
Watkins, C. J. C. H. (1989). Learning from Delayed Rewards. Ph.D. thesis, King’s College, Cambridge, UK.
Watkins, C. J. C. H., & Dayan, P. (1992). “Q-learning.” Machine Learning, 8(3–4), 279–292.
Mnih, V. et al. (2015). “Human-level control through deep reinforcement learning.” Nature, 518(7540), 529–533.
Mnih, V., Kavukcuoglu, K., Silver, D., et al. (2015). Human-level control through deep reinforcement learning.Nature, 518(7540), 529–533.
Watkins, C. J. C. H., & Dayan, P. (1992). Q-learning. Machine Learning, 8(3-4), 279–292.
Hasselt, H. v. (2016). Double Q-learning. AAAI Conference on Artificial Intelligence.
Lilian Weng (2018). Deep Reinforcement Learning Overview. MIT License blog.
OpenAI Spinning Up (2019). Educational RL Illustrations and Docs.
Williams, R. J. (1992). Simple Statistical Gradient-Following Algorithms for Connectionist RL. Machine Learning 8(3–4). (original REINFORCE). (www-anw.cs.umass.edu)
Sutton, R. S., McAllester, D., Singh, S., Mansour, Y. (2000). Policy Gradient Methods for RL with Function Approximation (PG theorem; baselines; compatible function approx.). (papers.neurips.cc)
Sutton, R. S., & Barto, A. G. (2018). Reinforcement Learning: An Introduction (2nd ed.) (Chapter 13: Policy Gradient Methods). (Stanford University)
Concept overviews & tutorials
OpenAI Spinning Up — Intro to Policy Optimization & VPG page (derivation, GAE pointers, taxonomy). (spinningup.openai.com)
Entropy & modern PG
Ahmed, Z. et al. (2019). Understanding the Impact of Entropy on Policy Optimization (ICML). (Proceedings of Machine Learning Research)
Haarnoja, T. et al. (2018). Soft Actor-Critic (max-entropy actor-critic; stability). (Proceedings of Machine Learning Research)
Figures (sources you can cite under each image)
Fig 3.2 (taxonomy): OpenAI Spinning Up RL algorithms diagram. (spinningup.openai.com)
Fig 3.3 (Gaussian PDFs): Wikimedia Commons — Normal Distribution PDF.svg (free license). (Wikimedia Commons)
PyTorch REINFORCE examples (CartPole & more). (GitHub)
Mnih, V. et al. (2016). Asynchronous Methods for Deep Reinforcement Learning. ICML 2016.Sutton, R. S., & Barto, A. G. (2018). Reinforcement Learning: An Introduction (2nd Ed.). MIT Press.Schulman, J. et al. (2017). Proximal Policy Optimization Algorithms. arXiv:1707.06347.PyTorch (2024). Reinforcement Learning Examples: Actor–Critic.
- OpenAI Baselines PPO2
- PyTorch Version: pytorch-a2c-ppo-acktr-gail
- Spinning Up Docs: spinningup.openai.com/…/ppo
Schulman, J., Wolski, F., Dhariwal, P., Radford, A., & Klimov, O. (2017). Proximal Policy Optimization Algorithms.arXiv:1707.06347.OpenAI Blog (2017). PPO: A New Method for Reliable Reinforcement Learning.OpenAI Five (2018). Dota 2 with Large-Scale Deep Reinforcement Learning.Christiano, P. et al. (2017). Deep Reinforcement Learning from Human Preferences. NeurIPS.Sutton, R. S., & Barto, A. G. (2018). Reinforcement Learning: An Introduction (2nd Ed.). MIT Press.
Bellman, R. (1957). Dynamic Programming. Princeton University Press.Sutton, R. S., & Barto, A. G. (2018). Reinforcement Learning: An Introduction (2nd ed.). MIT Press.Watkins, C. J. C. H. (1989). Learning from Delayed Rewards (PhD thesis). University of Cambridge.Williams, R. J. (1992). Simple statistical gradient-following algorithms for connectionist RL. Machine Learning, 8(3-4), 229–256.Mnih, V., et al. (2015). Human-level control through deep RL. Nature, 518, 529–533.Mnih, V., et al. (2016). Asynchronous methods for deep RL. ICML.Schulman, J., et al. (2016). High-dimensional continuous control using GAE. arXiv:1506.02438.Schulman, J., et al. (2017). Proximal Policy Optimization Algorithms. arXiv:1707.06347.